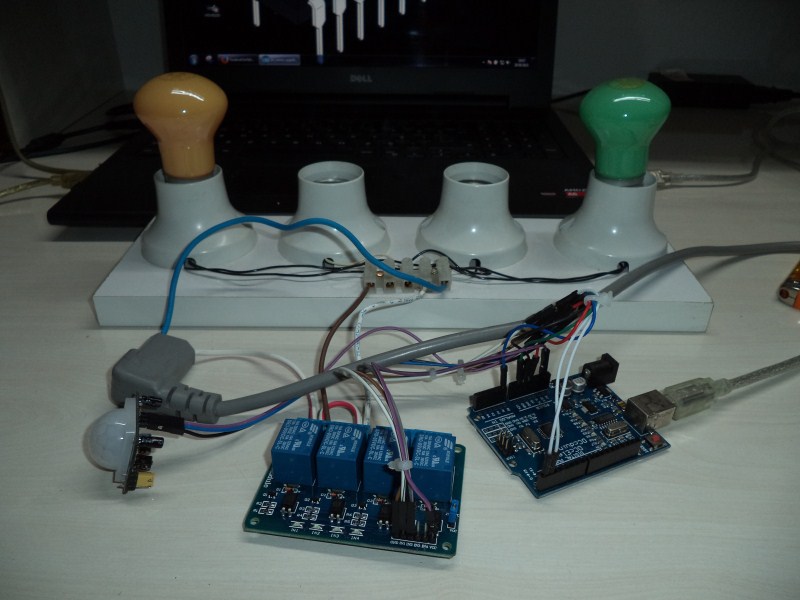
Bu dersimizde PIR sensör kontrollü çakar lamba uygulamasý yaparken PIR sensör ve röle modülünün de nasýl kullanýlacaðýný öðreneceðiz.
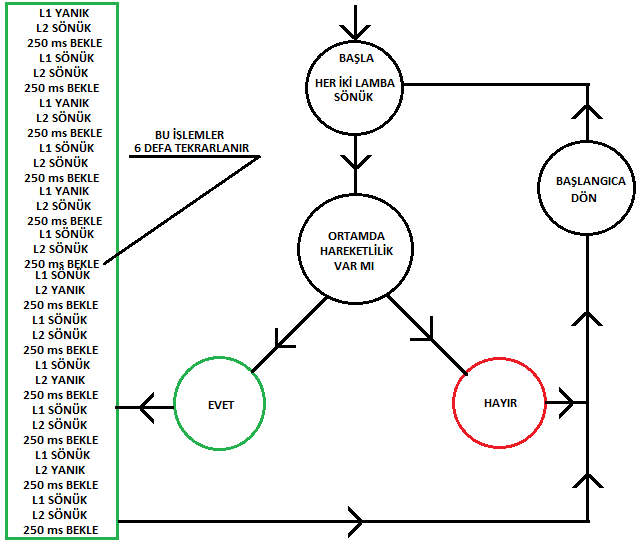
Soru:Sistemde hareket algýlamak üzere 1 adet PIR sensör ve 2 adet lamba bulunmaktadýr. PIR sensör hareket algýladýðýnda birinci lamba 250'þer ms aralýklarla 3 defa yanýp sönerken, ikinci lambanýn sönük kalmasý ve birinci lamba 3 kere flash çaktýktan sonra ikinci lambanýn 3 kere 250 ms aralýklarla yanýp sönerken birinci lambanýn sönük kalmasý istenmektedir. Bu senarya 6 kere tekrarlanacak ve ortaamdaki hareketlilik sona erdiyse sistem duracaktýr. Hareketlilik devam ediyorsa yukarýdaki senarya tekrar uygulamaya sokulacaktýr.
Ãözüm:Ãncelikle bizden ne istendiðinin net bir þekilde anlaþýlmasý için söz konusu senaryoya ait akýþ diyagramýný hazýrlayalým. Daha sonra oluþturduðumuz bu akýþ diyagramýndan program yazarken faydalanacaðýz.
 Bu akýþ diyagramýna göre yazýlmasý gereken program þu þekilde olacaktýr:
Bu akýþ diyagramýna göre yazýlmasý gereken program þu þekilde olacaktýr:
int pir_sensor_cikisi=A0; // A0 PÃNÃNE pir_sensor_cikisi ADI VERÃLDÃ
int lamba=0; // D0 PÃNÃNE lamba ADI VERÃLDÃ
int lamba2=1; // D1 PÃNÃNE lamba2 ADI VERÃLDÃ
void setup()
{
pinMode(pir_sensor_cikisi, INPUT); // A0 PÃNÃ PIR SENSÃRÃNÃ BAÃLAMA AMACIYLA GÃRÃÃ YAPILDI
pinMode(lamba, OUTPUT); // D0 PÃNÃ BÃRÃNCÃ LAMBAYI BAÃLAMA AMACIYLA ÃIKIÃ YAPILDI
pinMode(lamba2, OUTPUT); // D1 PÃNÃ ÃKÃNCÃ LAMBAYI BAÃLAMA AMACIYLA ÃIKIÃ YAPILDI
}
void loop()
{
// DÃKKAT RÃLE SHILD LOW AKTÃF ÃALIÃMAKTADIR
if (digitalRead(pir_sensor_cikisi) == HIGH ) // PIR SENSOR ÃIKIÃI AKTÃF ÃSE
{
for (int yak_sondur = 1; yak_sondur <= 6; yak_sondur ++)
{
digitalWrite(lamba, LOW); // BÃRÃNCÃ LAMBAYI YAK
digitalWrite(lamba2, HIGH); // ÃKÃNCÃ LAMBAYI SÃNDÃR
delay(250); // 250ms BEKLE
digitalWrite(lamba, HIGH); // BÃRÃNCÃ LAMBAYI SÃNDÃR
digitalWrite(lamba2, HIGH); // ÃKÃNCÃ LAMBAYI SÃNDÃR
delay(250); // 250ms BEKLE
digitalWrite(lamba, LOW); // BÃRÃNCÃ LAMBAYI YAK
digitalWrite(lamba2, HIGH); // ÃKÃNCÃ LAMBAYI SÃNDÃR
delay(250); // 250ms BEKLE
digitalWrite(lamba, HIGH); // BÃRÃNCÃ LAMBAYI SÃNDÃR
digitalWrite(lamba2, HIGH); // ÃKÃNCÃ LAMBAYI SÃNDÃR
delay(250); // 250ms BEKLE
digitalWrite(lamba, LOW); // BÃRÃNCÃ LAMBAYI YAK
digitalWrite(lamba2, HIGH); // ÃKÃNCÃ LAMBAYI SÃNDÃR
delay(250); // 250ms BEKLE
digitalWrite(lamba, HIGH); // BÃRÃNCÃ LAMBAYI SÃNDÃR
digitalWrite(lamba2, HIGH); // ÃKÃNCÃ LAMBAYI SÃNDÃR
delay(250); // 250ms BEKLE
digitalWrite(lamba, HIGH); // BÃRÃNCÃ LAMBAYI SÃNDÃR
digitalWrite(lamba2, LOW); // ÃKÃNCÃ LAMBAYI YAK
delay(250); // 250ms BEKLE
digitalWrite(lamba, HIGH); // BÃRÃNCÃ LAMBAYI SÃNDÃR
digitalWrite(lamba2, HIGH); // ÃKÃNCÃ LAMBAYI SÃNDÃR
delay(250); // 250ms BEKLE
digitalWrite(lamba, HIGH); // BÃRÃNCÃ LAMBAYI SÃNDÃR
digitalWrite(lamba2, LOW); // ÃKÃNCÃ LAMBAYI YAK
delay(250); // 250ms BEKLE
digitalWrite(lamba, HIGH); // BÃRÃNCÃ LAMBAYI SÃNDÃR
digitalWrite(lamba2, HIGH); // ÃKÃNCÃ LAMBAYI SÃNDÃR
delay(250); // 250ms BEKLE
digitalWrite(lamba, HIGH); // BÃRÃNCÃ LAMBAYI SÃNDÃR
digitalWrite(lamba2, LOW); // ÃKÃNCÃ LAMBAYI YAK
delay(250); // 250ms BEKLE
digitalWrite(lamba, HIGH); // BÃRÃNCÃ LAMBAYI SÃNDÃR
digitalWrite(lamba2, HIGH); // ÃKÃNCÃ LAMBAYI SÃNDÃR
delay(250); // 250ms BEKLE
}
}
else
{
digitalWrite(lamba, HIGH); // BÃRÃNCÃ LAMBAYI SÃNDÃR
digitalWrite(lamba2, HIGH); // ÃKÃNCÃ LAMBAYI SÃNDÃR
delay(250); // 250ms BEKLE
}
}
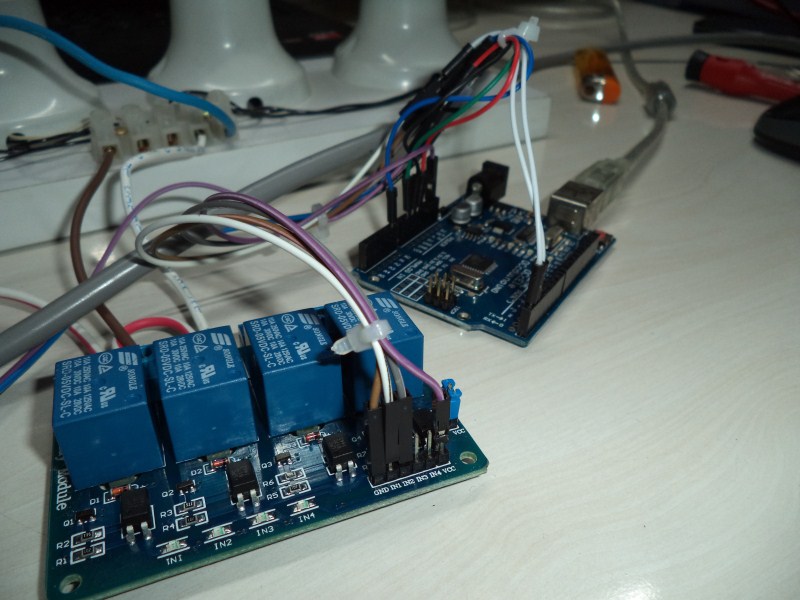
PIR sensörünün Vcc pini arduinonun 5V pinine ve ya 3,5Volt pinine
PIR sensörünün GND pini arduinonun GND pinine
PIR sensörünün OUT pini arduinonun A0 pinine
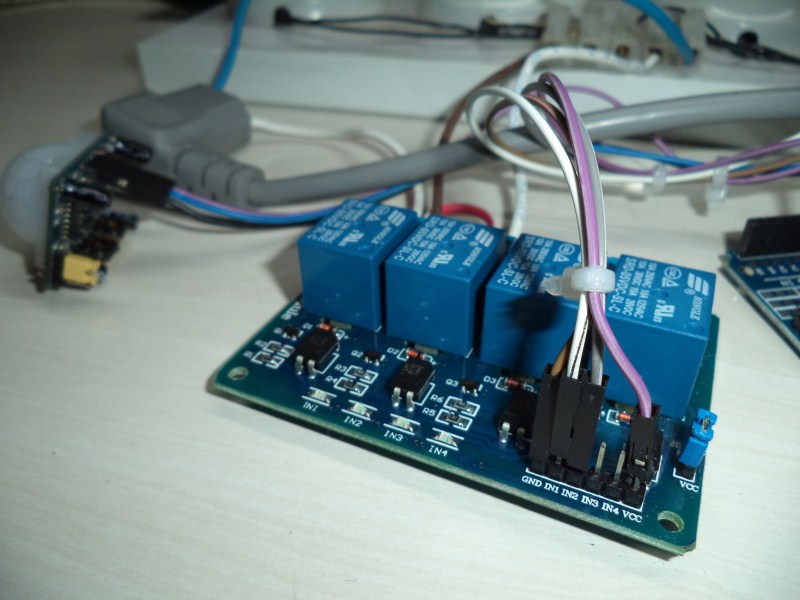
Röle modülünün Vcc pini arduinonun 5V pinine
Röle modülünün GND pini arduinonun GND pinine
Röle modülünün IN1 pini arduinonun D0 pinine
Röle modülünün IN2 pini arduinonun D1 pinine baðlanmalýdýr.
Ayrýca röle modülünün RL1 ve RL2 çýkýþlarýna birer lamba baðlanýr. Nasýl baðlanacaðýný bilmeyenler sorabilirler.Yanlýþ baðlantý yapýlmasý durumunda devrede kullanýlan malzemelerin zarar görmesi muhtemeldir.
