Bu özellik size üyenin attığı tüm iletileri gösterme olanağı sağlayacaktır . Not sadece size izin verilen bölümlerdeki iletilerini görebilirsiniz
Mesajlar - Hasan ERTÜRK
16
« : 12 Aralık 2020, 14:09:57 »
<a href="http://temrinlerim.org/pdf/4_yarim_dalga_dogrultmac.pdf" target="_blank">http://temrinlerim.org/pdf/4_yarim_dalga_dogrultmac.pdf</a>
Bu iletiye teşekkür edenler: taha126@gmail.com
17
« : 12 Aralık 2020, 14:08:58 »
<a href="http://temrinlerim.org/pdf/3_transistorun_anahtarlama.pdf" target="_blank">http://temrinlerim.org/pdf/3_transistorun_anahtarlama.pdf</a>
Bu iletiye teşekkür edenler: taha126@gmail.com
18
« : 12 Aralık 2020, 14:04:24 »
<a href="http://temrinlerim.org/pdf/2_Elektronik_malzemelerin_cagirilmasi.pdf" target="_blank">http://temrinlerim.org/pdf/2_Elektronik_malzemelerin_cagirilmasi.pdf</a>
Bu iletiye teşekkür edenler: taha126@gmail.com
19
« : 12 Aralık 2020, 14:02:28 »
<a href="http://temrinlerim.org/pdf/1_proteus_programi.pdf" target="_blank">http://temrinlerim.org/pdf/1_proteus_programi.pdf</a>
Bu iletiye teşekkür edenler: taha126@gmail.com
20
« : 15 Nisan 2019, 08:56:22 »
Kolay gelsin.
Bu iletiye teşekkür edenler: AhmetSafa
21
« : 02 Şubat 2019, 10:19:04 »
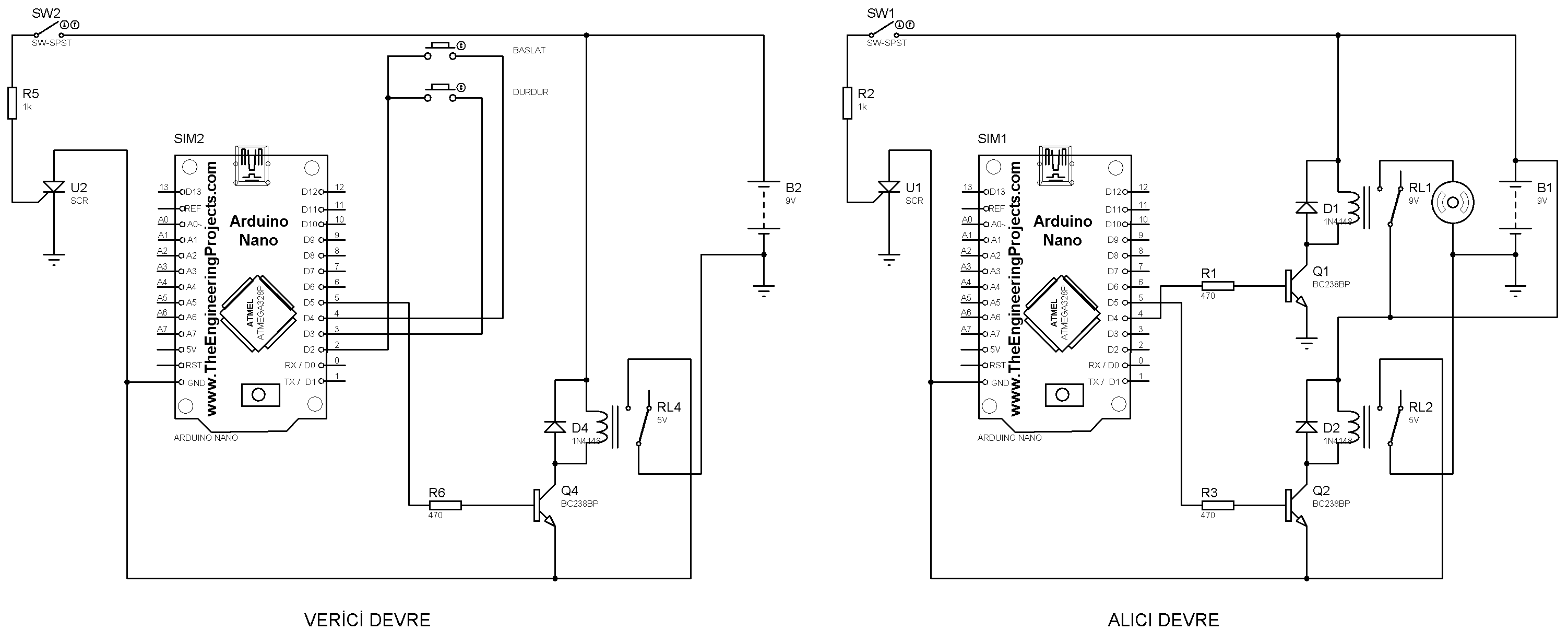
Merhaba. Ben uygulamalarımda RF24-master kütüphanesini kullanıyorum. Örnek uygulama kodları aşağıda mevcut. Kütüphaneyi ekten indirebilirsin. Alıcı kodları
#include <SPI.h>
#include &#38;#38;#34;RF24.h&#38;#38;#34;
int bilgi[1];
RF24 radio(9,10);
const uint64_t pipe = 0xE8E8F0F0E1LL;
int reset = 5;
int motor = 4;
void setup()
{
radio.begin();
radio.openReadingPipe(1,pipe);
radio.startListening();
Serial.begin(9600);
pinMode(reset, OUTPUT);
pinMode(motor, OUTPUT);
}
void loop()
{
if (radio.available())
{
bool done = false;
done = radio.read(bilgi, 1);
Serial.println(bilgi[0]);
delay(10);
}
if (bilgi[0] == 252) &#38;#38;#47;&#38;#38;#47; baslat
{
digitalWrite(motor, HIGH);
delay(5000);
digitalWrite(motor, LOW);
digitalWrite(reset,HIGH);
delay(1000);
digitalWrite(reset,LOW);
delay(1000);
}
if (bilgi[0] == 251) &#38;#38;#47;&#38;#38;#47; durdur
{
digitalWrite(motor, LOW);
digitalWrite(reset,HIGH);
delay(1000);
digitalWrite(reset,LOW);
delay(1000);
}
if (bilgi[0] == 250) &#38;#38;#47;&#38;#38;#47; calistir
{
digitalWrite(motor, HIGH);
}
}
Verici kodları:
#include <SPI.h>
#include &#38;#34;RF24.h&#38;#34;
int bilgi[1];
RF24 radio(9,10);
const uint64_t pipe = 0xE8E8F0F0E1LL;
#include <Keypad.h>
#include <Wire.h>
char customKey;
const byte ROWS = 3;
const byte COLS = 1;
char keys[ROWS][COLS] =
{
{&#38;#39;3&#38;#39;},
{&#38;#39;6&#38;#39;},
{&#38;#39;9&#38;#39;}
};
byte rowPins[ROWS] = {4, 3, 7};
byte colPins[COLS] = {2};
Keypad customKeypad( makeKeymap(keys), rowPins, colPins, ROWS, COLS);
int reset = 5;
void setup() {
Serial.begin(9600);
radio.begin();
radio.openWritingPipe(pipe);
pinMode(reset, OUTPUT);
}
void loop()
{
customKey = customKeypad.getKey();
if (customKey == &#38;#39;3&#38;#39;) {baslat();}
if (customKey == &#38;#39;6&#38;#39;) {durdur();}
if (customKey == &#38;#39;9&#38;#39;) {calistir();}
}
void baslat()
{
Serial.println(&#38;#34;Baslat&#38;#34;);
for (int RobotikCenter = 1; RobotikCenter <= 20; RobotikCenter ++)
{
bilgi[0] = 252;
radio.write(bilgi, 1);
Serial.println(bilgi[0]);
}
digitalWrite(reset, HIGH);
delay(500);
digitalWrite(reset, LOW);
delay(500);
}
void durdur()
{
Serial.println(&#38;#34;Durdur&#38;#34;);
for (int RobotikCenter = 1; RobotikCenter <= 20; RobotikCenter ++)
{
bilgi[0] = 251;
radio.write(bilgi, 1);
Serial.println(bilgi[0]);
}
digitalWrite(reset, HIGH);
delay(500);
digitalWrite(reset, LOW);
delay(500);
}
void calistir()
{
Serial.println(&#38;#34;Calistir&#38;#34;);
for (int RobotikCenter = 1; RobotikCenter <= 20; RobotikCenter ++)
{
bilgi[0] = 250;
radio.write(bilgi, 1);
Serial.println(bilgi[0]);
}
digitalWrite(reset, HIGH);
delay(500);
digitalWrite(reset, LOW);
delay(500);
}
Bu iletiye teşekkür edenler: burakoyke
22
« : 08 Ocak 2019, 11:03:27 »
23
« : 06 Aralık 2018, 22:09:32 »
Devreye enerji verdikten sonra ledin 5 saniye sonra yanması istenmekte. Led yandıktan sonra butona basılırsa led sönecek ve 5 saniyeyi tekrar saymaya başlayacak. 5 saniye dolunca led tekrar yanacak. 5 saniye dolmadan butona basılırsa sayılan süre resetlenmeyecek. int led1=9;
int button=12;
unsigned long onceki_zaman = 0;
const long bekleme_suresi = 5000;
void setup()
{
pinMode (led1, OUTPUT);
pinMode (button, INPUT);
}
void loop()
{
unsigned long simdiki_zaman = millis();
if (simdiki_zaman - onceki_zaman >= bekleme_suresi) {digitalWrite(led1, HIGH);}
if (digitalRead(button)==HIGH && simdiki_zaman - onceki_zaman >= bekleme_suresi){digitalWrite(led1, LOW); onceki_zaman = simdiki_zaman;}
}
Bu iletiye teşekkür edenler: veyselairrr
24
« : 17 Ekim 2018, 14:15:36 »
/*
gungor 28/10/2017
Arduino kodla resetleme
*/
#include <avr/wdt.h>
void setup() {
Serial.begin(9600);
Serial.println("Ardiuno Start");
}
void loop() {
Serial.println( millis() );
//1 saniye = 1000 millis
if (millis() > 5000) {
Serial.print("Reset");// gunde bir sefer reset
wdt_enable( WDTO_60MS);
while(1) {}
}
delay(250);
}
Bu iletiye teşekkür edenler: latcakir
25
« : 07 Haziran 2018, 18:49:52 »
DHT11 ısı ve nem sensörü ile ısı ve nem değerleri ölçülüp 16x2 lcd sheeld ekranında görüntülenir. Malzeme listesi: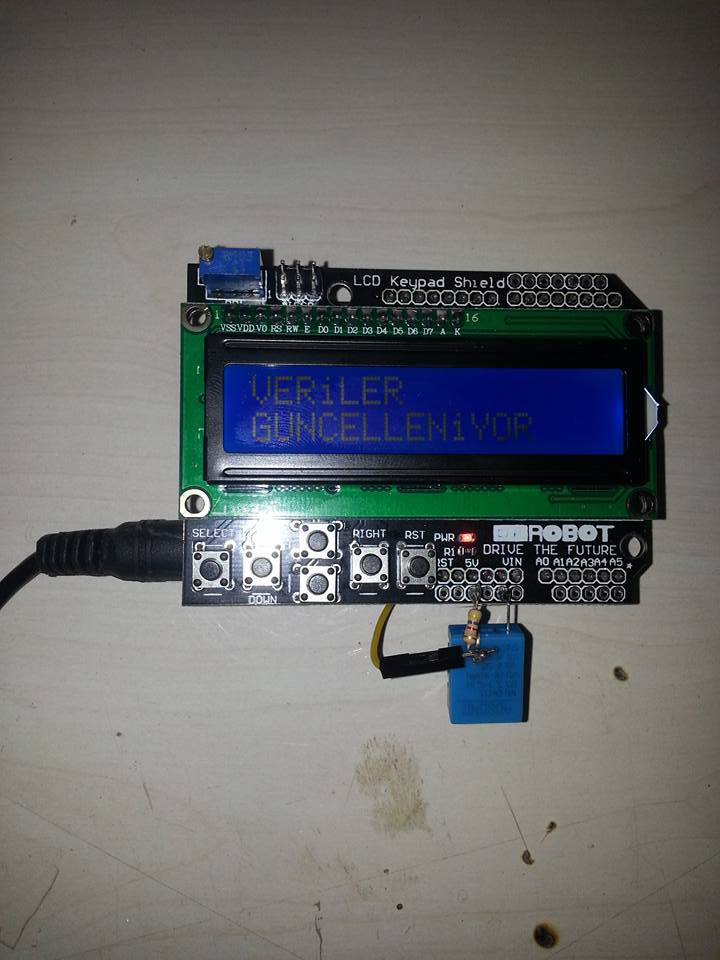 Fotoğraf 1: DHT11 ile ısı ve nem ölçümü  Fotoğraf 1: DHT11 ile ısı ve nem ölçümü 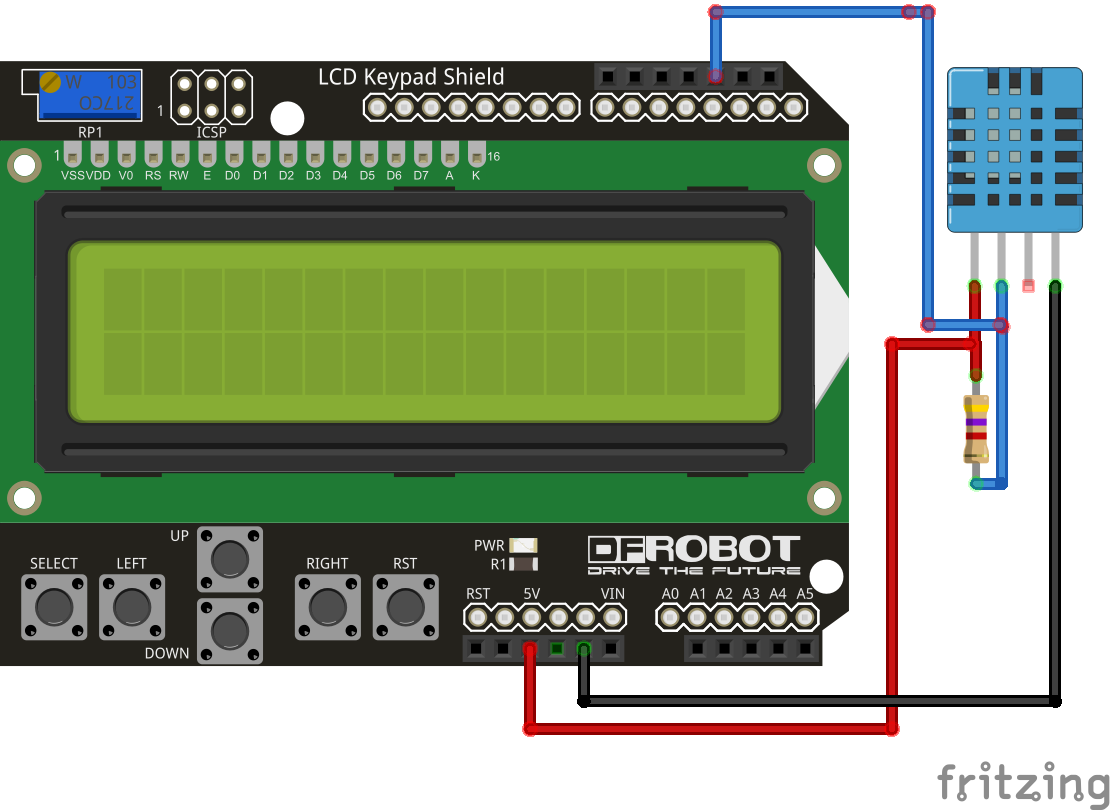 Şema 1: DHT11 ile ısı ve nem ölçümüne ait fritzing devre şeması #include <DHT11.h>
#include <Wire.h>
#include <LiquidCrystal.h>
LiquidCrystal lcd(8, 9, 4, 5, 6, 7);
int pin = 2;
DHT11 dht11(pin);
double Fahrenheit(double celsius) {
return ((double)(9 / 5) * celsius) + 32;
}
double Kelvin(double celsius) {
return celsius + 273.15;
}
void setup() {
lcd.begin(16, 2);
}
void loop() {
int err;
float temp, humi;
if ((err = dht11.read(humi, temp)) == 0)
{
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("VERiLER");
lcd.setCursor(0, 1);
lcd.print("GUNCELLENiYOR");
delay(1000);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("SICAKLIK");
lcd.setCursor(0, 1);
lcd.print("NEM");
lcd.setCursor(9, 0);
lcd.print(temp);
lcd.print((char)223);
lcd.print("C");
lcd.setCursor(9, 1);
lcd.print(humi);
lcd.print(" %");
delay(5000);
}
else
{
lcd.println();
lcd.print("Error No :");
lcd.print(err);
lcd.println();
}
}Konu ekinde fritzing dosyası, dht11 kütüphanesi ve arduino dosyası mevcuttur.
Bu iletiye teşekkür edenler: Mesut PÜRMÜSLÜ
26
« : 31 Mayıs 2018, 18:33:10 »
Video 1: Step motorun joystick ile yön kontrolü Senaryo:Joystick kolunun ileri geri hareketi ile step motorun yön kontrolü istenmektedir. Joystick orta konumda iken step motor duracaktır. Malzeme listesi:- 28BYJ-48 Step motor ve sürücü kartı
- Arduino uno
- Erkek dişi jumper kablo
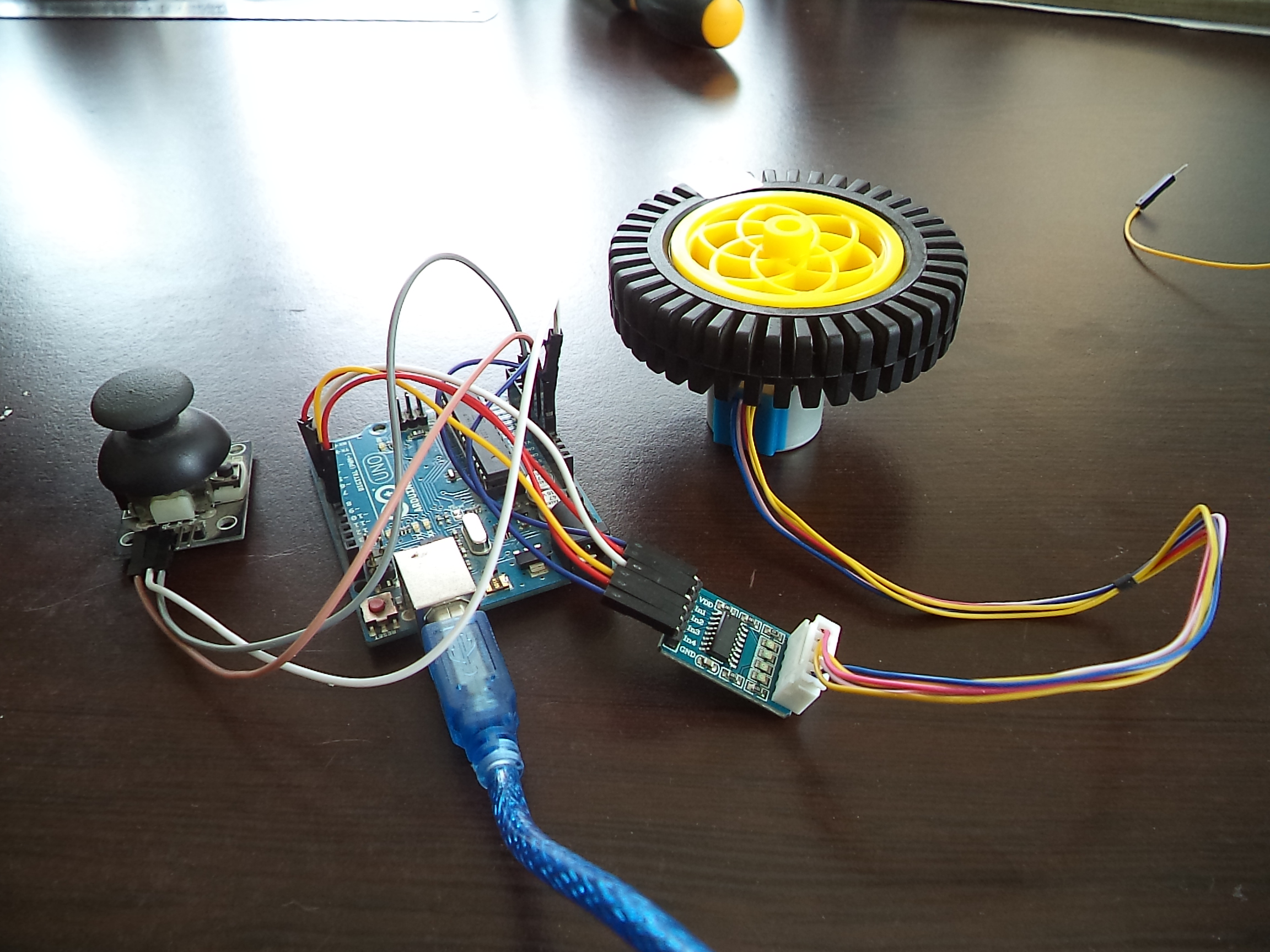 Fotoğraf 1: Devrenin tamamlanmış hali 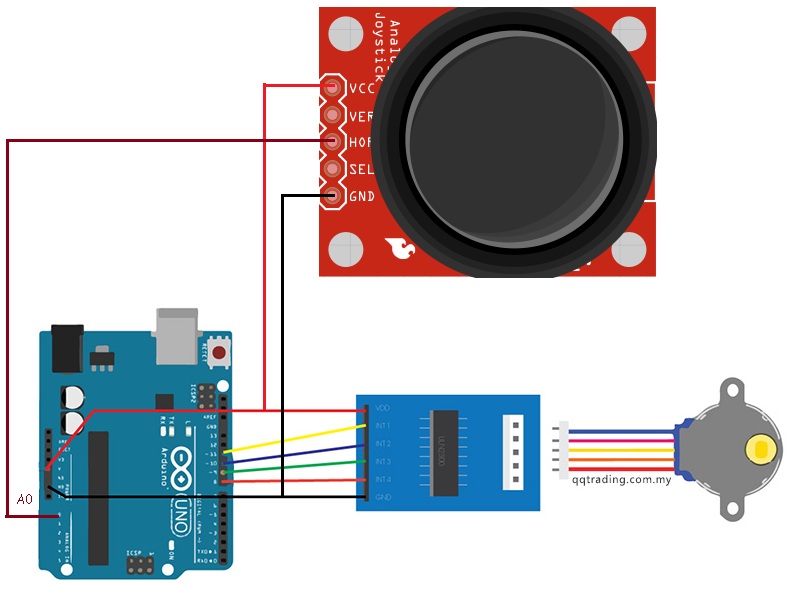 Şema 1: Fritzing devre şeması #include <StepperMotor.h> // step motor kutuphanesi eklendi
StepperMotor motor(8,9,10,11); // step motor pinleri in1,in2, in3, in4
const int joystick = A0;
int joystick_konum=0;
int step_deger = 0;
void setup()
{
motor.setStepDuration(1);
Serial.begin(9600);
}
void loop()
{
joystick_konum=analogRead(joystick);
step_deger= map(joystick_konum,0,1023,-103,100);
motor.step(step_deger);
Serial.println(step_deger);
delay(1);
}
Bu iletiye teşekkür edenler: Mesut PÜRMÜSLÜ
27
« : 31 Aralık 2017, 20:42:39 »
DFRobotun üreticisi olduğu APC220 modülü ile iki ya da daha fazla sayıdaki arduinoyu haberleştirerek kablosuz projelerinizi hayata geçirebilirsiniz. Ürün Ayrıntısı1000m ye kadar iletişim mesafesi (görüş alanı) @9600 bps 256 byte veri bufferı Yüksek hassasiyet (-112dbbm @9600 bps) GFSK modülasyonu UART/TTL arayüzü Gömülü watchdog timer Boyut: 37 x 17 x 6.5 mm (1.46x 0.67x 0.26 in) Kutu İçeriği: 2 x APC220 modülü 2 x Radyo iletişim anteni 1 x USB to TTL dönüştürücü SenaryoBu projemizde verici devredeki butona basıldığında verici devredeki bir ledle beraber alıcı devrede bulunan ikinci bir ledi yakacağız. Buton bırakıldığında her iki led de sönecektir. Ön hazırlık1. Modüle ait usb sürücüsü bilgisayara tanıtılır. Sürücüye ait kurulum dosyasını konu ekinden indirebilirsiniz. 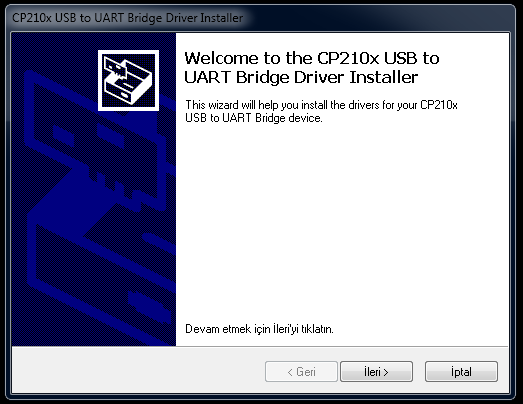 Resim 1: USB sürücüsünün kurulması 2. Modülün ayarlarını yapmak için paket içerisinde gelen USB TTL dönüştürücüyü kullanacağız. Bu ayarları yapmak için anten modülünü dönüştürücüye takıp ekten indireceğiniz APC22X_V12A isimli uygulamayı yönetici olarak çalıştırınız. USB sürücüsünü sorunsuz bir şekilde kurmuş iseniz uygulama çalıştırıldığında dönüştürücünün takılı olduğu port otomatik olarak uygulama penceresinde görünecektir. Resim 2de görüldüğü gibi arayüz ekranından ayarlarını yapınız. Frekans, net id ve nod id değerlerini kendinize göre değiştirebilirsiniz. Write butonu ayarlarınızı modüle kaydeder. Read butonu ise modül ayarlarını arayüz ekranına taşır. 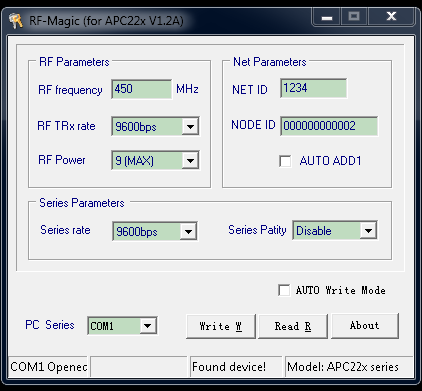 Resim 2: Modül ayarlarının yapılması 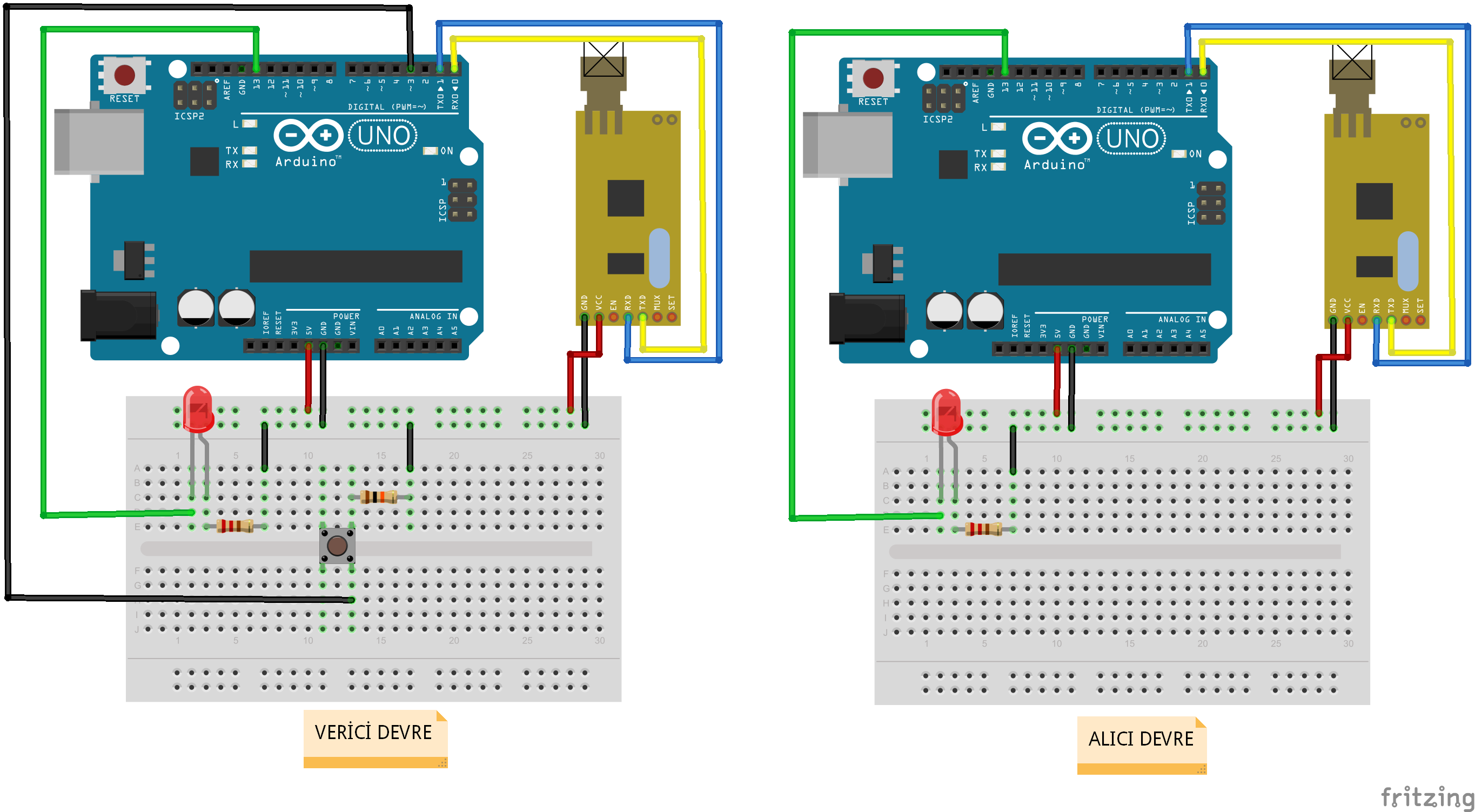 Şema 1: Alıcı ve vericiye ait fritzing devre şemaları int led_pin = 13;
int buton_pin = 3;
void setup()
{
pinMode(led_pin, OUTPUT);
pinMode(buton_pin,INPUT);
Serial.begin(9600);
}
void loop()
{
if (digitalRead(buton_pin)==HIGH)
{
Serial.write(242);
digitalWrite(led_pin,HIGH);
delay (10);
}
if (digitalRead(buton_pin)==LOW)
{
Serial.write(0);
digitalWrite(led_pin,LOW);
delay (10);
}
}Alıcı devre kodlarıint led_pin = 13;
void setup()
{
pinMode(led_pin, OUTPUT);
Serial.begin(9600);
}
void loop()
{
int veri=Serial.read();
if(veri==0) {digitalWrite(led_pin,LOW);}
if(veri==242) {digitalWrite(led_pin,HIGH);}
}
Bu iletiye teşekkür edenler: Samanyolu
28
« : 25 Ocak 2017, 12:46:47 »
80'leri yaşayanlar bilir. 1980'li yıllarda Amerika Birleşik Devletlerinde yayınlanan ve dünyanın birçok ülkesinde popüler olan bir televizyon dizisi olan Kara Şimşek, Türkiye'de de TRT tarafından yayınlanmıştır. Bu dizideki Knight Rider ışık efektini arduino kullanarak yapacağız. Daha fazlası için domieBlog sitesini ziyaret edebilirsiniz.
Bu iletiye teşekkür edenler: taha126@gmail.com
29
« : 04 Aralık 2016, 14:15:39 »
 | 3 katlı binaya ait FATEK PLC ile hazırlanmış asansör projesi.
Fiyatı 600 TL dir.
İletişim için 0542 343 09 15
Güncel fiyat ve satın almak için telefon açınız.
email: erturkhasan70@hotmail.com |
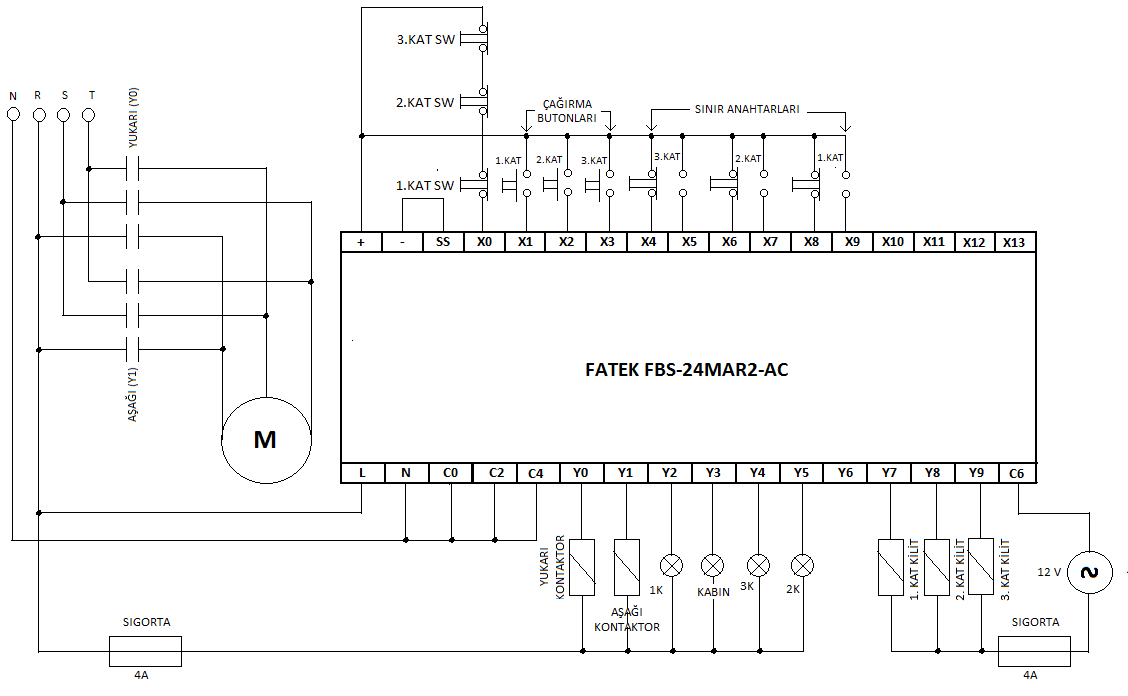 ASANSÖRÜN KULLANIMI VE ÖZELLİKLERİ ASANSÖRÜN KULLANIMI VE ÖZELLİKLERİAsansörümüz yük asansörü olduğundan kabin içerisinde kat butonları bulunmamaktadır. Her katta gidilmek istenen kata ait butonlar bulunmaktadır. Asansör bulunduğunuz kata ait butona basılarak çağırılır, kapı açılır, yük yüklenir ve kapı kapatılır. Yükün hangi kata çıkması isteniyorsa ilgili kat butonuna basılır. 5 saniyelik beklemeden sonra asansör hareket edecektir. Kabin katta değilken ilgili katın kapısı açılmaz. Kabin içi aydınlatma devresi mevcuttur.
Bu iletiye teşekkür edenler: huseyinhg
30
« : 13 Ekim 2016, 00:10:28 »
Bu dersimizde düzenli olarak tekrarlayan kodları onlarca kez yazmak yerine bir kere yazıp kısaltmayı öğreneceğiz. Nasıl yapılacağını örnek bir devre üzerinden açıklayalım. Senaryo:Birisi yeşil diğeri sarı olmak üzere 2 ledimiz var. Arduinoya enerji verildiği anda yeşil ledin 150 ms aralıklarla 10 defa flip flop yapıp sönmesi isteniyor. Yeşil led flip flop yaparken sarı led sönük kalacak. Yeşil led 10 defa flip flop yaptıktan sonra da sarı ledin 150 ms aralıklarla 10 defa flip flop yapıp sönmesi isteniyor. Bu döngü sonsuza dek devam edecektir. Bu senaryoya ait devre şemamız şu şekilde: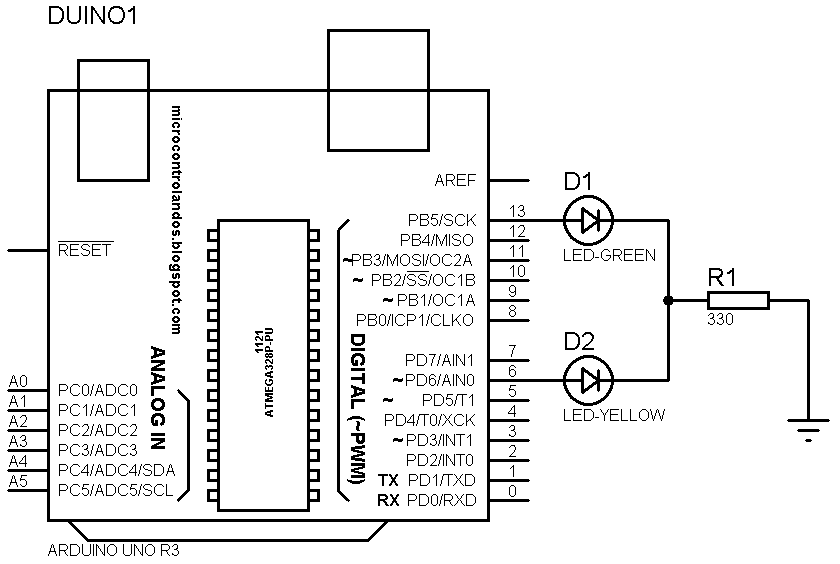 Bu devreye ve istenen senaryoya ait kodlarımız şu şekilde: Bu devreye ve istenen senaryoya ait kodlarımız şu şekilde:
/*
* * * * * * * * * * * *
* * * * * * * * * * * *
* * * *
* * TEKRARLAYAN KODLARI * *
* * KISALTMA * *
* * temrinlerim.org * *
* * * *
* * * * * * * * * * * *
* * * * * * * * * * * *
*/
// CIKIS TANIMLAMALARI BURADA BASLADI
int yesil_led = 13; // 13 nolu pine yesil_led adini verdik
int sari_led = 6; // 6 nolu pine sari_led adini verdik
// CIKIS TANIMLAMALARI BURADA BITTI
void setup()
{
pinMode(yesil_led, OUTPUT); // yesil_led isimli pin (13) cikis yapildi
pinMode(sari_led, OUTPUT); // sari_led isimli pin (6) cikis yapildi
}
void loop()
{
for (int yesil_ledi_10_defa_flash_yap = 1; yesil_ledi_10_defa_flash_yap <= 10; yesil_ledi_10_defa_flash_yap ++)
{
digitalWrite(yesil_led, HIGH);
delay(150);
digitalWrite(yesil_led, LOW);
delay(150);
}
for (int sari_ledi_10_defa_flash_yap = 1; sari_ledi_10_defa_flash_yap <= 10; sari_ledi_10_defa_flash_yap ++)
{
digitalWrite(sari_led, HIGH);
delay(150);
digitalWrite(sari_led, LOW);
delay(150);
}
}
Kodları inceleyecek olursak yeşil ledin flip flop yapmasını sağlayan kodlar şunlar: digitalWrite(yesil_led, HIGH);
delay(150);
digitalWrite(yesil_led, LOW);
delay(150);Bu kod yeşil ledin 1 kere flip flop yapmasını sağlayacaktır. Ancak bu kodu; şu kod ile: for (int [color=teal]yesil_ledi_10_defa_flash_yap[/color] = 1; [color=teal]yesil_ledi_10_defa_flash_yap[/color] <= [color=red]10[/color]; [color=teal]yesil_ledi_10_defa_flash_yap[/color] ++)
{şu kod } arasına yazarsam yeşil led 10 kere flip flop yapacaktır. Aynı durum sarı led için de söz konusudur. Kodda kırmızı renk ile vurguladığım 10 sayısı ledin iki parantez arasındaki kodların 10 kere çalıştıktan sonra programın bir alt satıra geçeceğini ifade eder. Yeşil renkle vurguladığım yesil_ledi_10_defa_flash_yap (3 yerde geçiyor) ifadesi yerine başka bir şey yazabilirsiniz. Örnekten anlaşılacağı üzere onlarca satır yazmadığımız için program gayet sade oldu. program ilk bakışta çok daha anlaşılabilir olacaktır. Umarım anlatabilmişimdir. Bu da söz konusu devreye ait proteus similasyonu:Devreye ait isis ve ide dosyaları konu ekinde mevcuttur. Anlatım, kodlama, tasarım, video ve resim temrinlerim.org sitesine aittir. Bu konu kaynak gösterilerek kullanılabilir.
Bu iletiye teşekkür edenler: veyselairrr
|