Bu özellik size üyenin attığı tüm iletileri gösterme olanağı sağlayacaktır . Not sadece size izin verilen bölümlerdeki iletilerini görebilirsiniz
Mesajlar - Hasan ERTÜRK
Sayfa: 1 2 3 [4] 5 6 ... 45
46
« : 03 Temmuz 2021, 00:35:01 »
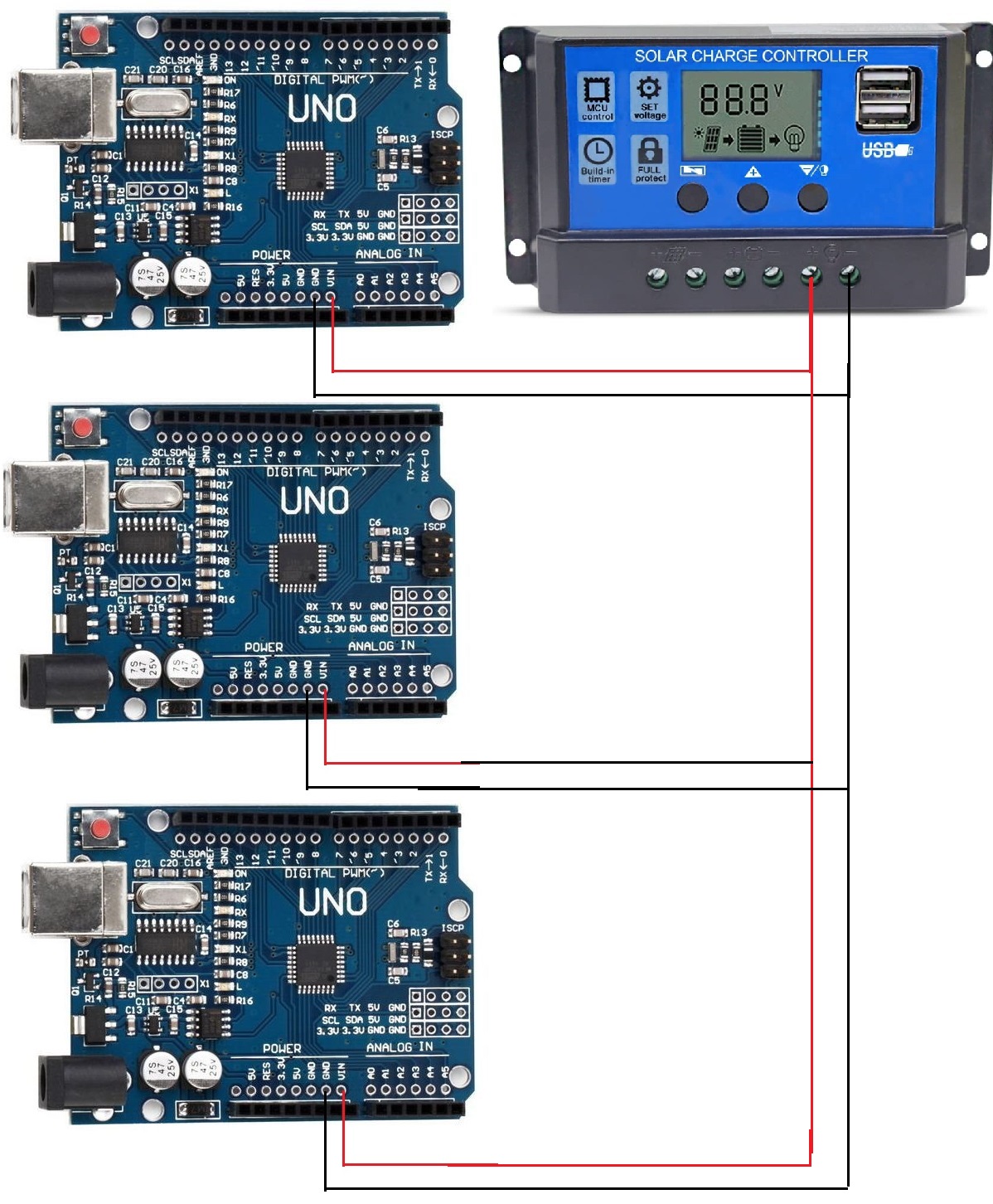 Resimdeki besleyebilirsiniz. 14 Voltu aşmamanızı tavsiye ederim.
47
« : 25 Nisan 2021, 18:07:26 »
 int pot_pin = A0; //Potansiyometreyi A0 pinine tanımlıyoruz
int ileri_pin = 5;
int geri_pin = 3;
int pwm_pin = 9;
// DEGISKENLER
int pot_deger = 0;
int hiz = 0;
int voltaj = 0;
void setup()
{
pinMode(pot_pin, INPUT);
pinMode(ileri_pin, OUTPUT);
pinMode(geri_pin, OUTPUT);
pinMode(pwm_pin, OUTPUT);
Serial.begin(9600);
}
void loop()
{
pot_konumunu_oku_degerlendir();
}
void pot_konumunu_oku_degerlendir()
{
pot_deger = analogRead(pot_pin);
voltaj = map(pot_deger, 0, 1023, 0, 5000);
Serial.print(" Voltaj: "); Serial.print(voltaj); Serial.print(" mV ");
if(pot_deger < 10) {hiz = 180; ileri_git(); Serial.print(" iLERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 10 && pot_deger < 102) {hiz = 195; ileri_git(); Serial.print(" iLERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 102 && pot_deger < 207) {hiz = 210; ileri_git(); Serial.print(" iLERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 207 && pot_deger < 307) {hiz = 225; ileri_git(); Serial.print(" iLERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 307 && pot_deger < 409) {hiz = 240; ileri_git(); Serial.print(" iLERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 409 && pot_deger < 500) {hiz = 255; ileri_git(); Serial.print(" iLERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 500 && pot_deger < 524) {hiz = 0; dur(); Serial.print(" HIZ: "); Serial.println(hiz);}
if(pot_deger >= 524 && pot_deger < 614) {hiz = 180; geri_git(); Serial.print(" GERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 614 && pot_deger < 716) {hiz = 195; geri_git(); Serial.print(" GERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 716 && pot_deger < 818) {hiz = 210; geri_git(); Serial.print(" GERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 818 && pot_deger < 920) {hiz = 225; geri_git(); Serial.print(" GERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 920 && pot_deger < 1013) {hiz = 240; geri_git(); Serial.print(" GERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 1013) {hiz = 255; geri_git(); Serial.print(" GERi HIZ: "); Serial.println(hiz);}
}
void ileri_git()
{
digitalWrite(ileri_pin, HIGH);
digitalWrite(geri_pin, LOW);
analogWrite(pwm_pin, hiz);
}
void geri_git()
{
digitalWrite(ileri_pin, LOW);
digitalWrite(geri_pin, HIGH);
analogWrite(pwm_pin, hiz);
}
void dur()
{
digitalWrite(ileri_pin, LOW);
digitalWrite(geri_pin, LOW);
digitalWrite(pwm_pin, LOW);
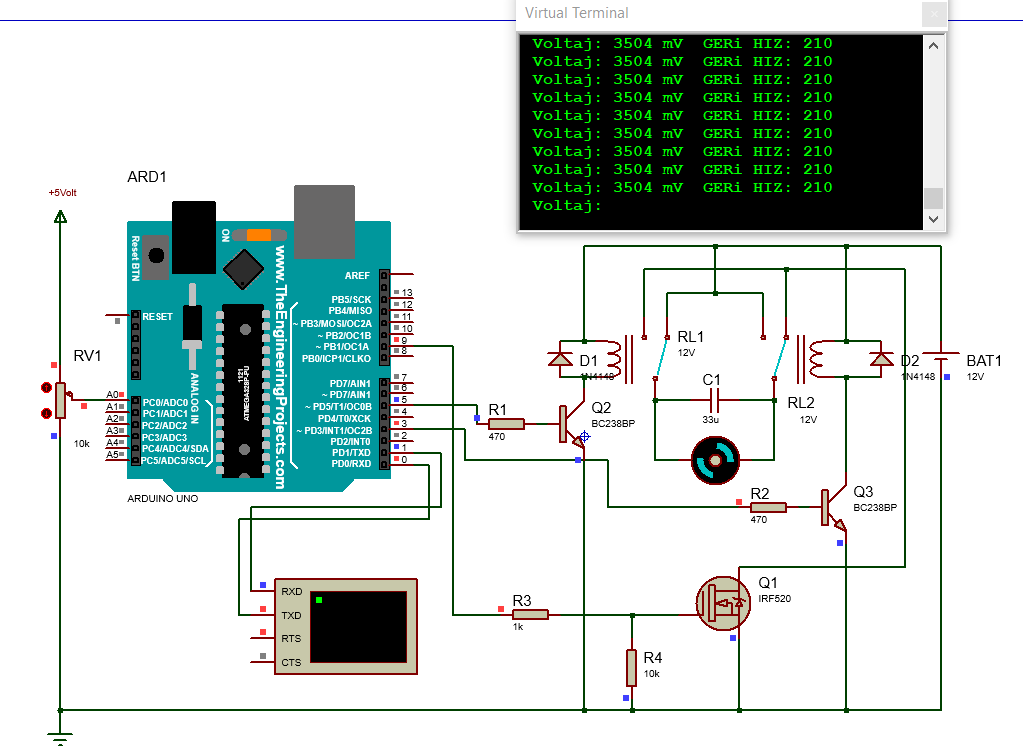
}Bu da röleli ve mosfetli tasarım. Röleler ileri ya da geri yön için motora yol verir. Mosfet ise arduinodan gelen pwm sinyaline göre ile motor hızını ayarlar. Daha önce verdiğim devreden daha sağlıklı çalışır. Diğerinde 5 Volt motor kullanmak gerek. Bunda farklı voltajlarda çalışan motorları kullanılabilir.
48
« : 25 Nisan 2021, 02:27:14 »
Analog A0 pininden bir potansiyometre üzerindeki gerilim değerleri okunacak ve motor hız kontrolü yapılacaktır. Potansiyometre üzerinde okunan değer 0-5V arasında ölçeklendirilmelidir. 0V-2.5V arasında belirli bir yönde dönen motor, 2.5V-5V arasında gerilim değerlerinde tam tersi yönde dönmelidir. Motorunuzun hızı her 0.5V aralıkta biraz daha hızlanmalıdır. (0-0.5V arasında belli bir hızda, 0.5-1V arasında daha hızlı olacak şekilde 2.5Va kadar hızlanmalıdır. 2.5Vun üzerinde ise diğer dönme yönünde yine aynı gerilim aralığı ile hızı giderek artmalıdır.)  int pot_pin = A0; //Potansiyometreyi A0 pinine tanımlıyoruz
int ileri_pin = 5;
int geri_pin = 3;
// DEGISKENLER
int pot_deger = 0;
int hiz = 0;
int voltaj = 0;
void setup()
{
pinMode(pot_pin, INPUT);
pinMode(ileri_pin, OUTPUT);
pinMode(geri_pin, OUTPUT);
Serial.begin(9600);
}
void loop()
{
pot_konumunu_oku_degerlendir();
}
void pot_konumunu_oku_degerlendir()
{
pot_deger = analogRead(pot_pin);
voltaj = map(pot_deger, 0, 1023, 0, 5000);
Serial.print(" Voltaj: "); Serial.print(voltaj); Serial.print(" mV ");
if(pot_deger < 10) {hiz = 180; ileri_git(); Serial.print(" iLERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 10 && pot_deger < 102) {hiz = 195; ileri_git(); Serial.print(" iLERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 102 && pot_deger < 207) {hiz = 210; ileri_git(); Serial.print(" iLERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 207 && pot_deger < 307) {hiz = 225; ileri_git(); Serial.print(" iLERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 307 && pot_deger < 409) {hiz = 240; ileri_git(); Serial.print(" iLERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 409 && pot_deger < 500) {hiz = 255; ileri_git(); Serial.print(" iLERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 500 && pot_deger < 524) {hiz = 0; dur(); Serial.print(" HIZ: "); Serial.println(hiz);}
if(pot_deger >= 524 && pot_deger < 614) {hiz = 180; geri_git(); Serial.print(" GERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 614 && pot_deger < 716) {hiz = 195; geri_git(); Serial.print(" GERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 716 && pot_deger < 818) {hiz = 210; geri_git(); Serial.print(" GERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 818 && pot_deger < 920) {hiz = 225; geri_git(); Serial.print(" GERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 920 && pot_deger < 1013) {hiz = 240; geri_git(); Serial.print(" GERi HIZ: "); Serial.println(hiz);}
if(pot_deger >= 1013) {hiz = 255; geri_git(); Serial.print(" GERi HIZ: "); Serial.println(hiz);}
}
void ileri_git()
{
analogWrite(ileri_pin, hiz);
digitalWrite(geri_pin, LOW);
}
void geri_git()
{
digitalWrite(ileri_pin, LOW);
analogWrite(geri_pin, hiz);
}
void dur()
{
digitalWrite(ileri_pin, LOW);
digitalWrite(geri_pin, LOW);
}
49
« : 24 Nisan 2021, 21:17:28 »
<a href="http://temrinlerim.org/pdf/11_ac_akimin_vektorlerle_gosterilmesi.pdf" target="_blank">http://temrinlerim.org/pdf/11_ac_akimin_vektorlerle_gosterilmesi.pdf</a>
50
« : 24 Nisan 2021, 21:16:43 »
<a href="http://temrinlerim.org/pdf/10_ac_akim_degerleri.pdf" target="_blank">http://temrinlerim.org/pdf/10_ac_akim_degerleri.pdf</a>
51
« : 24 Nisan 2021, 21:16:06 »
<a href="http://temrinlerim.org/pdf/9_alternatif_akim.pdf" target="_blank">http://temrinlerim.org/pdf/9_alternatif_akim.pdf</a>
52
« : 24 Nisan 2021, 21:15:24 »
<a href="http://temrinlerim.org/pdf/8_dc_motorlar.pdf" target="_blank">http://temrinlerim.org/pdf/8_dc_motorlar.pdf</a>
53
« : 24 Nisan 2021, 21:14:43 »
<a href="http://temrinlerim.org/pdf/7_elektromanyetizma.pdf" target="_blank">http://temrinlerim.org/pdf/7_elektromanyetizma.pdf</a>
54
« : 24 Nisan 2021, 21:13:13 »
<a href="http://temrinlerim.org/pdf/6_cevre_akimlari_yontemi.pdf" target="_blank">http://temrinlerim.org/pdf/6_cevre_akimlari_yontemi.pdf</a>
55
« : 24 Nisan 2021, 21:12:29 »
<a href="http://temrinlerim.org/pdf/5_karisik_devre.pdf" target="_blank">http://temrinlerim.org/pdf/5_karisik_devre.pdf</a>
56
« : 24 Nisan 2021, 21:11:12 »
<a href="http://temrinlerim.org/pdf/4_paralel_devre.pdf" target="_blank">http://temrinlerim.org/pdf/4_paralel_devre.pdf</a>
57
« : 24 Nisan 2021, 21:10:38 »
<a href="http://temrinlerim.org/pdf/3_seri_devre.pdf" target="_blank">http://temrinlerim.org/pdf/3_seri_devre.pdf</a>
58
« : 24 Nisan 2021, 21:09:49 »
<a href="http://temrinlerim.org/pdf/2_ohm_kanunu.pdf" target="_blank">http://temrinlerim.org/pdf/2_ohm_kanunu.pdf</a>
59
« : 24 Nisan 2021, 21:08:24 »
<a href="http://temrinlerim.org/pdf/1_dogru_akim.pdf" target="_blank">http://temrinlerim.org/pdf/1_dogru_akim.pdf</a>
60
« : 03 Mart 2021, 21:02:05 »
Senaryo:Üç fazlı asenkron motor aşağıdaki şekilde çalışacaktır. 1. Motor her iki yönde de kontak emniyeti kullanılarak yıldız / üçgen (Y/D) yol alacaktır. 2. Motorun durdurulması için sargılar DF kontaktörü ile yıldız bağlı konumda iken dinamik frenleme ile olacak, motorun çalışmasında ve dinamik frenlemesinde aynı termik görev yapacaktır. 3. Kumanda devresi ve frenleme gücünü sağlayan transformatörün primer besleme gerilimi 380 Volt olacaktır. 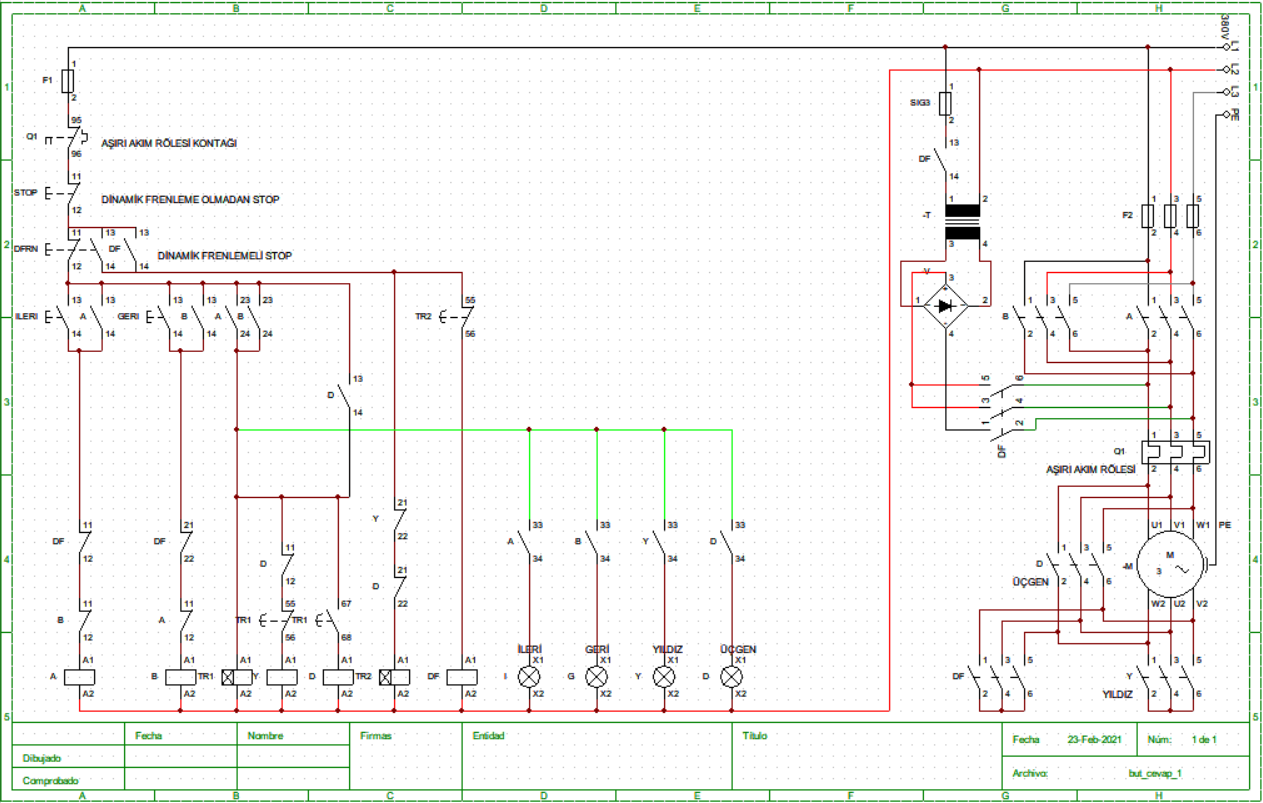
Sayfa: 1 2 3 [4] 5 6 ... 45
|