Bu özellik size üyenin attığı tüm iletileri gösterme olanağı sağlayacaktır . Not sadece size izin verilen bölümlerdeki iletilerini görebilirsiniz
Mesajlar - Hasan ERTÜRK
Sayfa: 1 ... 5 6 [7] 8 9 ... 45
92
« : 05 Eylül 2019, 23:26:43 »
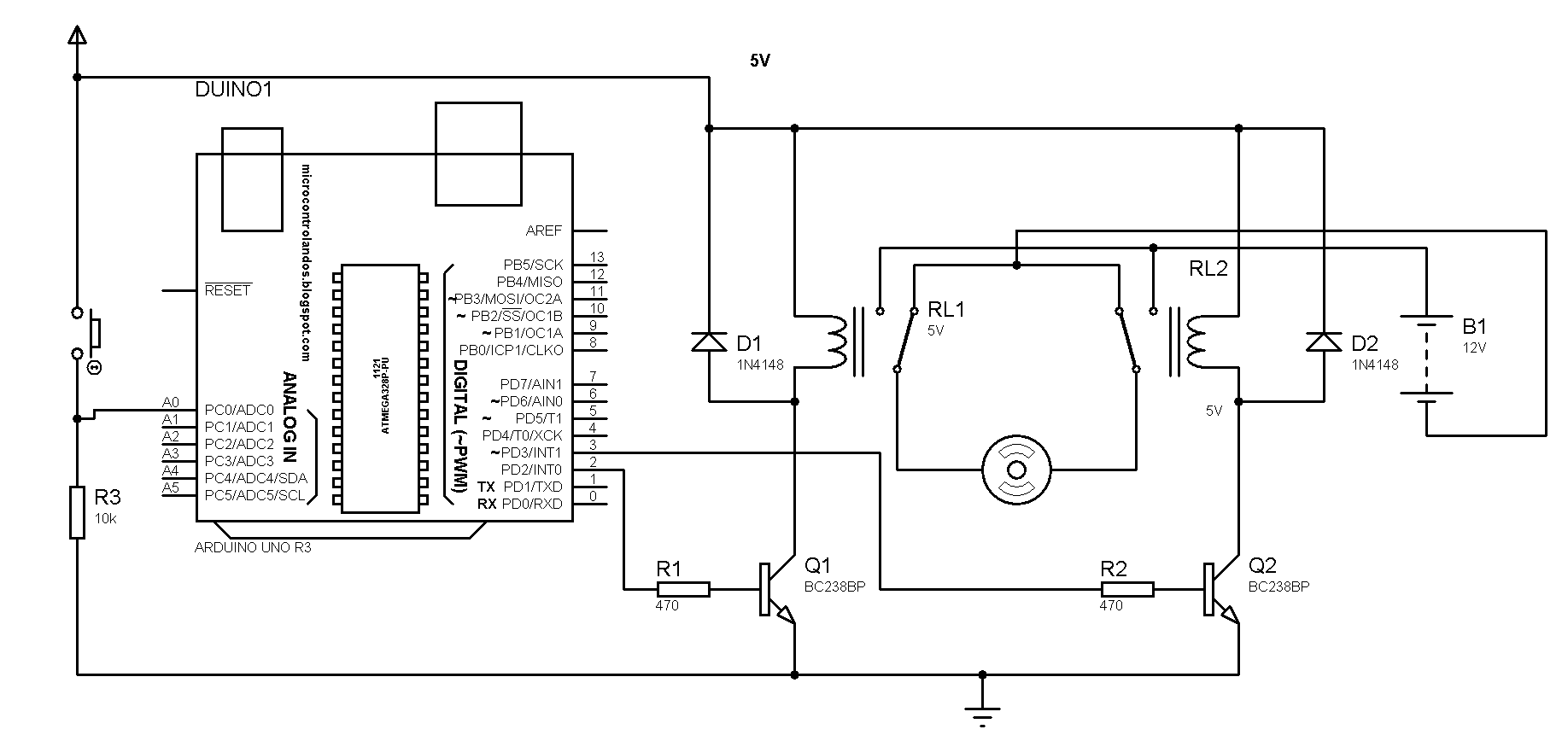
Butona ilk basışta motor doğru yönde, ikinci basışta ters yönde dönecek. Buton basılı kaldığı sürece motor dönecektir. Buton bırakılırsa motor duracaktır. Aşağıdaki devre işinizi görür. Fritzing devre şeması: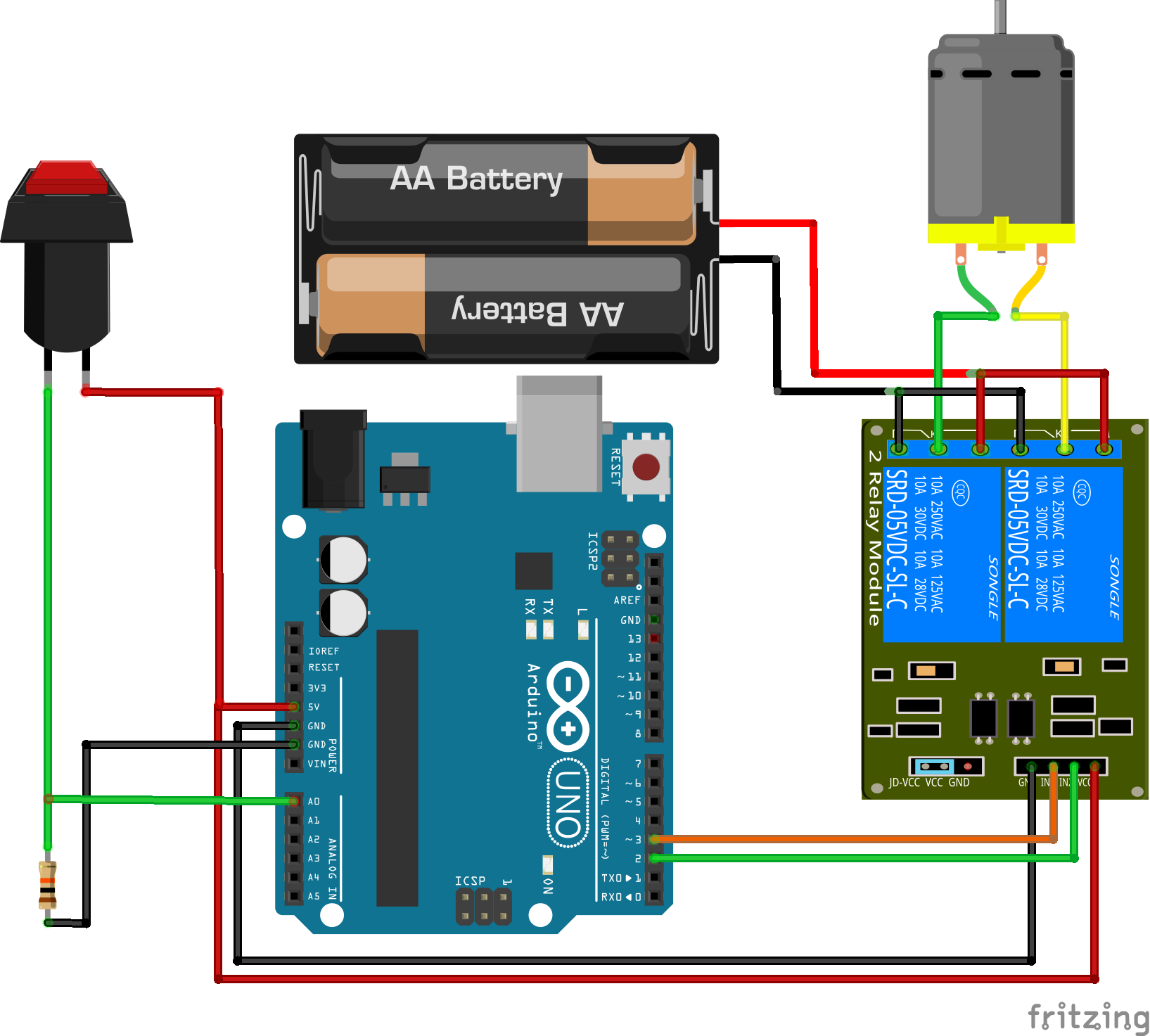 isis devre şeması: isis devre şeması:
Program kodları:// GIRISLER
int buton= A0;
// CIKISLAR
int ileri= 2;
int geri= 3;
// DEGISKENLER
int motor_durum=0;
int izin=0;
void setup()
{
pinMode(ileri, OUTPUT);
pinMode(geri, OUTPUT);
pinMode(buton, INPUT);
}
void loop()
{
if (digitalRead(buton)==LOW) {dur();}
else
{
if (digitalRead(buton)==HIGH && motor_durum == 0) {ileri_don();}
else if (digitalRead(buton)==HIGH && motor_durum == 1 && izin == 1) {geri_don();}
else if (digitalRead(buton)==HIGH && motor_durum == 2 && izin == 1) {ileri_don();}
}
}
void dur()
{
digitalWrite(ileri, LOW);
digitalWrite(geri, LOW);
izin=1;
}
void ileri_don()
{
digitalWrite(ileri, HIGH);
digitalWrite(geri, LOW);
motor_durum=1;
izin=0;
}
void geri_don()
{
digitalWrite(ileri, LOW);
digitalWrite(geri, HIGH);
motor_durum=2;
izin=0;
}Kontak sıçraması durumunda aşağıdaki kodlar kullanılabilir: // GIRISLER
int buton= A0;
// CIKISLAR
int ileri= 2;
int geri= 3;
// DEGISKENLER
int motor_durum=0;
int izin=0;
void setup()
{
pinMode(ileri, OUTPUT);
pinMode(geri, OUTPUT);
pinMode(buton, INPUT);
}
void loop()
{
if (digitalRead(buton)==LOW)
{
delay(50);
if (digitalRead(buton)==LOW) {dur();}
}
else
{
if (digitalRead(buton)==HIGH && motor_durum == 0)
{
delay(50);
if (digitalRead(buton)==HIGH && motor_durum == 0){ileri_don();}
}
else if (digitalRead(buton)==HIGH && motor_durum == 1 && izin == 1)
{
delay(50);
if (digitalRead(buton)==HIGH && motor_durum == 1 && izin == 1){geri_don();}
}
else if (digitalRead(buton)==HIGH && motor_durum == 2 && izin == 1)
{
delay(50);
if (digitalRead(buton)==HIGH && motor_durum == 2 && izin == 1){ileri_don();}
}
}
}
void dur()
{
digitalWrite(ileri, LOW);
digitalWrite(geri, LOW);
izin=1;
}
void ileri_don()
{
digitalWrite(ileri, HIGH);
digitalWrite(geri, LOW);
motor_durum=1;
izin=0;
}
void geri_don()
{
digitalWrite(ileri, LOW);
digitalWrite(geri, HIGH);
motor_durum=2;
izin=0;
}
93
« : 24 Ağustos 2019, 09:48:24 »
<a href="http://temrinlerim.org/pdf/notr.pdf" target="_blank">http://temrinlerim.org/pdf/notr.pdf</a>
94
« : 20 Haziran 2019, 13:23:54 »
95
« : 20 Haziran 2019, 13:23:37 »
97
« : 01 Mayıs 2019, 22:54:34 »
SMS ile ortamdaki sıcaklık durumu sorgulanabilir. Sıcaklık limit değerler arasında değilse sms mesajı alınabilir. SMS ile farklı cihazlar açılıp kapatılabilir. Satın almak için buraya tıklayınız.
98
« : 19 Nisan 2019, 09:34:53 »
Birinci buton birinci zili, ikinci buton ikinci zili, üçüncü buton ise her iki zili çalıştırır. 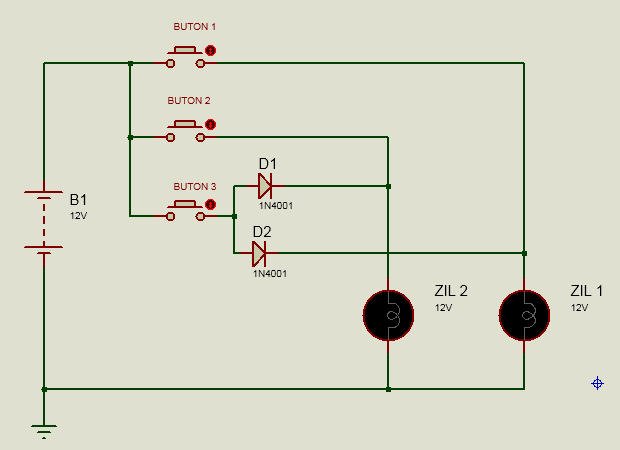
99
« : 15 Nisan 2019, 08:56:22 »
Kolay gelsin.
100
« : 06 Nisan 2019, 22:10:21 »
Önceden tanımlanmış bir parmak, parmak izi sensörüne okutulduğunda hdd açılacaktır. Yine önceden tanımlanmış bir başka parmak parmak izi sensörüne okutulduğunda hdd kapanacaktır. HDD açıkken RGB led yeşil renk alır. HDD kapalı iken RGB led kırmızı renk alır. Tanımsız bir parmak okutulduğunda ise RGB led mavi renk almaktadır. Devre şeması: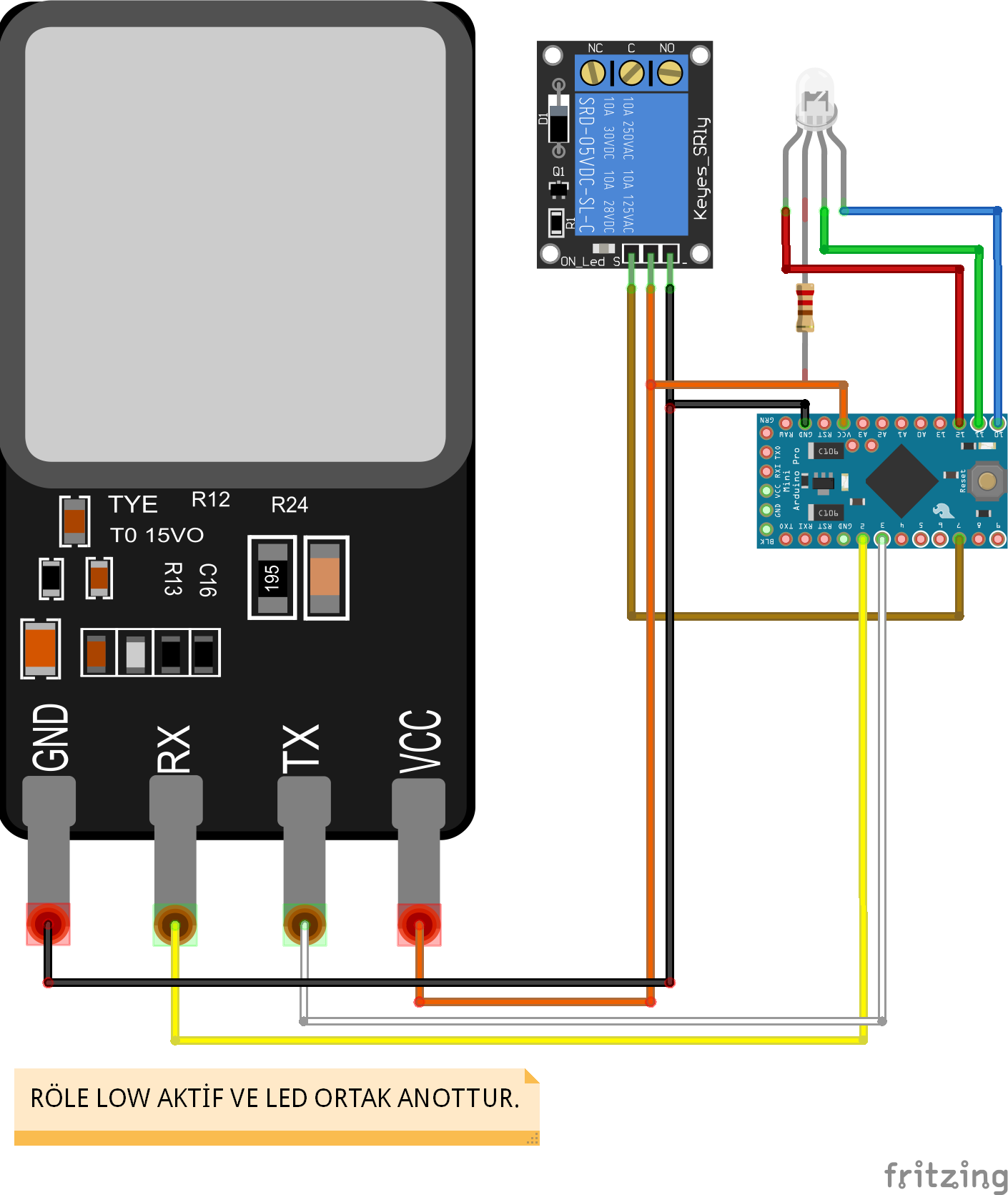 Yetkili parmak izinlerinin tanımlanması Yetkili parmak izinlerinin tanımlanmasıYetkili parmak izinlerinin tanımlanması için aşağıdaki işlem basamaklarını gerçekleştiriniz. 1. Parmak isimli klasörün içinde bulunan parmak.ino dosyasını arduino idesi ile açarak arduinoya yükleyiniz. 2. Yükleme işlemi tamamlandıktan sonra seri port ekranını açarak yönergeleri takip ederek parmak izinizi parmak izi sensörüne kaydediniz. 127 adet parmak tanımlayabilirsiniz. Yetkili parmak izlerinin silinmesiYetkili parmak izinlerinin silinmesi için aşağıdaki işlem basamaklarını gerçekleştiriniz. 1. Parmak isimli klasörün içinde bulunan parmak_sil.ino dosyasını arduino idesi ile açarak arduinoya yükleyiniz. 2. Yükleme işlemi tamamlandıktan sonra seri port ekranını açarak yönergeleri takip ederek daha önce kaydedilmiş parmaklara ait tanımlamaları siliniz. Kullanma talimatıDevre aşağıda belirtilen işlem sırasıyla çalışır hale gelmektedir. 1. Yetkili parmak izinlerinin tanımlanması başlığında belirtilen şekilde 1 kereye mahsus parmak tanımlamalarını yapınız. 2. Parmakla isimli klasörün içinde bulunan parmakla.ino dosyasını arduinoya yükleyiniz. 3. Seri port ekranını açarak tanımlanmış ve tanımlanmamış parmakları sensöre okutarak gelişen olayları seri port üzerinden takip ediniz. 4. Devreye ilk defa enerji uygulandığında RGB led mavi renkte yanacaktır. 5. HDDyi açmak için tanımlanmış bir parmak sensöre okutulduğunda RGB led yeşil renge dönecek ve röle çekecektir. Rölenin çekmesiyle beraber HDDye enerji gelecek ve HDD açılacaktır. 6. HDDyi kapatmak için tanımlanmış bir parmak sensöre okutulduğunda RGB led kırmızı renge dönecek ve röle bırakacaktır. Rölenin bırakmasıyla beraber HDDye gelen enerji kesilecek ve HDD kapanacaktır. 7. Tanımlanmamış bir parmak sensöre okutulduğunda RGB led mavi renge dönecek ve röle çekili ise bırakacaktır. Rölenin bırakmasıyla beraber HDDye gelen enerji kesilecek ve HDD kapanacaktır. Öneriler:HDD beslemesinin ve arduino usb kablosundan ayırıp röle üzerinden verilmesi durumunda rölenin çektiği anda arduinonun resetlenmesi gözlenirse beslemeye parralel 470 mikrofaradlık bağlanması önerilir.
101
« : 23 Mart 2019, 10:02:57 »
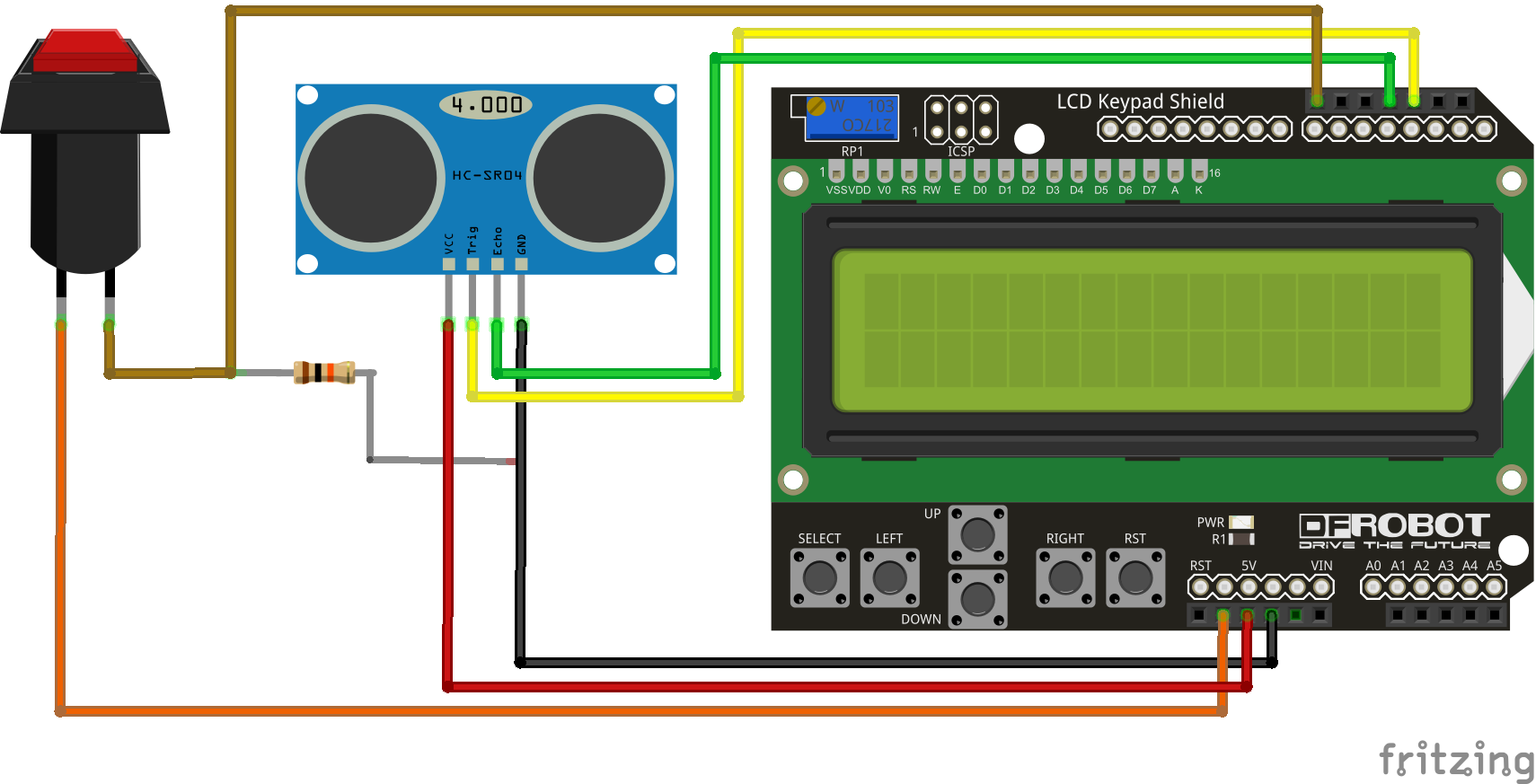 #include <LiquidCrystal.h> // likid kristal kutuphanesi eklendi
LiquidCrystal lcd(8,9,4,5,6,7); // likid kristal pinleri
#define echoPin 2 // eko pini D2
#define trigPin 3 // tetik pini D3
#define buton 13 // buton pini D13
long sure, kalibre_mesafesi, cisim_ile_sensor_arasindaki_mesafe, boy;
void setup()
{
pinMode(echoPin, INPUT);
pinMode(trigPin,OUTPUT);
acilis_iletisi();
kalibre_et();
}
void loop()
{
olcumu_baslat();
if(digitalRead(buton) == 1)
{
olcum_yap();
sure_hesapla();
cisim_ile_sensor_arasindaki_mesafeyi_hesapla();
boy_hesapla();
}
}
void acilis_iletisi()
{
lcd.begin(16,2);
lcd.clear();
lcd.setCursor(0,0);
lcd.print("BOY OLCER ");
lcd.setCursor(0,1);
lcd.print("4006 BiLiM FUARI");
delay(1500);
}
void kalibre_et()
{
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin,LOW);
sure = pulseIn(echoPin, HIGH);
kalibre_mesafesi = sure / 29.1 / 2;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("KALiBRASYON");
lcd.setCursor(0,1);
lcd.print("YAPILDI");
delay(1000);
}
void olcumu_baslat()
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print("BOYUNUZU OLCMEK");
lcd.setCursor(0,1);
lcd.print("iCiN BUTON BASIN");
delay(200);
}
void olcum_yap()
{
lcd.clear();
lcd.setCursor(0,0);
lcd.print("BOYUNUZ");
lcd.setCursor(0,1);
lcd.print("OLCULUYOR");
delay(1000);
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin,LOW);
}
void sure_hesapla()
{
sure = pulseIn(echoPin, HIGH); // Eko pini 5V gelmesinden itibaren süre ölç sure degiskenine kaydet
}
void cisim_ile_sensor_arasindaki_mesafeyi_hesapla()
{
cisim_ile_sensor_arasindaki_mesafe = sure / 29.1 / 2;
}
void boy_hesapla()
{
boy = kalibre_mesafesi - cisim_ile_sensor_arasindaki_mesafe;
lcd.clear();
lcd.setCursor(0,0);
lcd.print("BOYUNUZ ");
lcd.print(boy);
lcd.print(" cm ");
lcd.setCursor(0,1);
lcd.print("OLARAK OLCULDU ");
delay(5000);
}
102
« : 14 Mart 2019, 14:41:36 »
Fritzing devre şeması: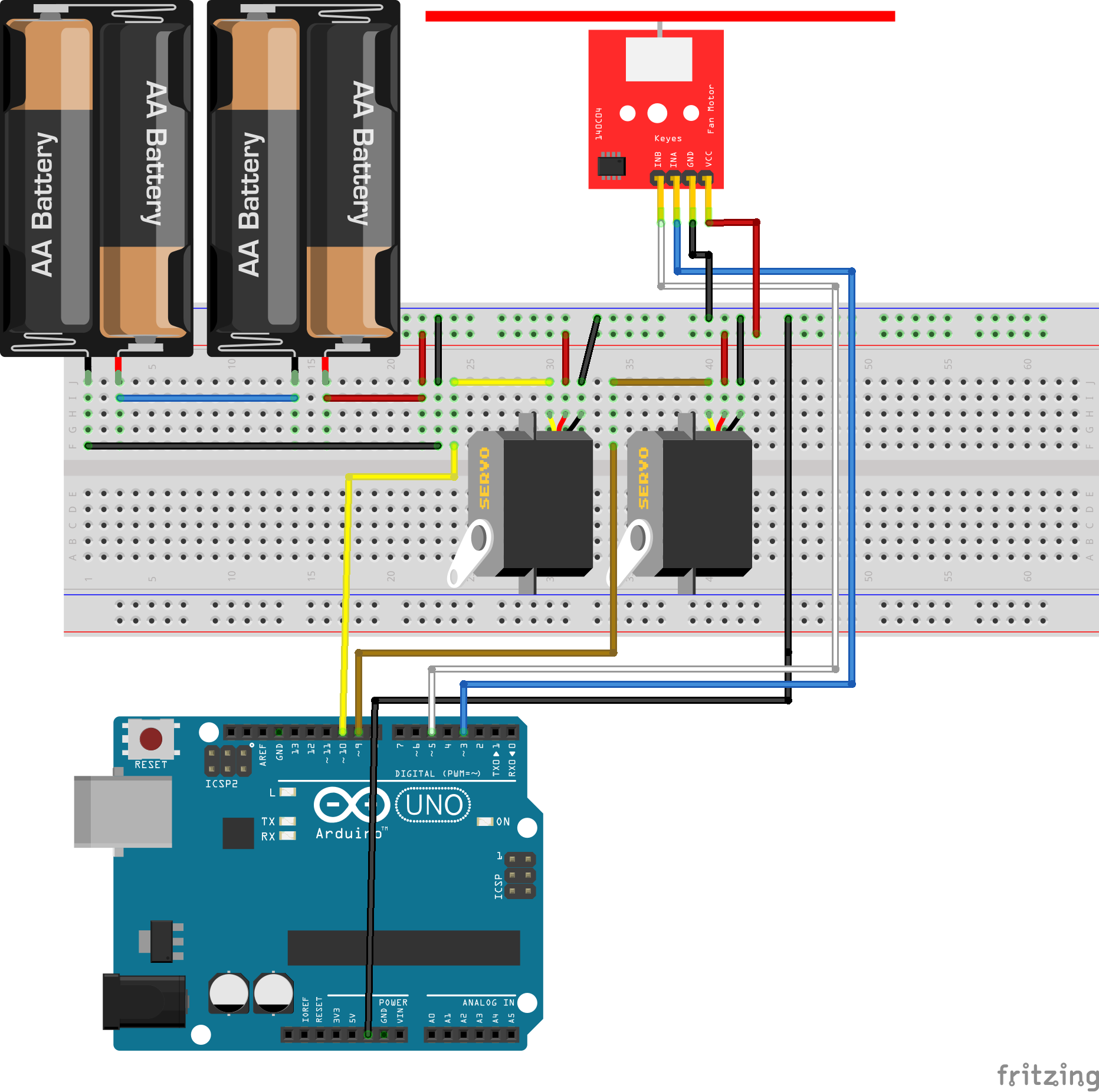 Arduino kodları: Arduino kodları:#include <Servo.h>
Servo yatay_servo;
Servo dikey_servo;
int fan_a=3;
int fan_b=5;
byte pozisyon = 0;
int fan_hizi=255;
void setup()
{
yatay_servo.attach(9);
dikey_servo.attach(10);
yatay_servo.write(90);
dikey_servo.write(0);
pinMode(fan_a, OUTPUT);
pinMode(fan_b, OUTPUT);
}
void loop()
{
for(pozisyon = 0; pozisyon < 180; pozisyon += 1)
{
yatay_servo.write(pozisyon);
delay(15);
}
for(pozisyon = 0; pozisyon < 90; pozisyon += 1)
{
dikey_servo.write(pozisyon);
delay(15);
}
delay(1000);
for(pozisyon = 90; pozisyon >= 1; pozisyon -= 1)
{
dikey_servo.write(pozisyon);
delay(15);
}
for(pozisyon = 180; pozisyon >=1; pozisyon -= 1)
{
yatay_servo.write(pozisyon);
delay(15);
}
fan_calistir();
delay(750);
fan_durdur();
}
void fan_calistir()
{
analogWrite(fan_a, 0);
analogWrite(fan_b, fan_hizi);
}
void fan_durdur()
{
analogWrite(fan_a, 0);
analogWrite(fan_b, 0);
}
Malzeme listesi:
103
« : 13 Mart 2019, 18:08:56 »
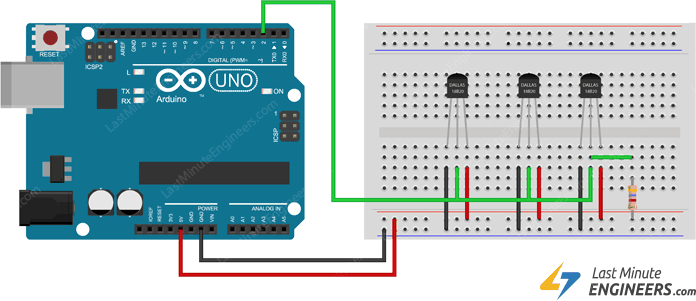  #include <OneWire.h>
#include <DallasTemperature.h>
// Data wire is plugged into port 2 on the Arduino
#define ONE_WIRE_BUS 2
// Setup a oneWire instance to communicate with any OneWire devices
OneWire oneWire(ONE_WIRE_BUS);
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature sensors(&oneWire);
// variable to hold device addresses
DeviceAddress Thermometer;
int deviceCount = 0;
void setup(void)
{
// start serial port
Serial.begin(9600);
// Start up the library
sensors.begin();
// locate devices on the bus
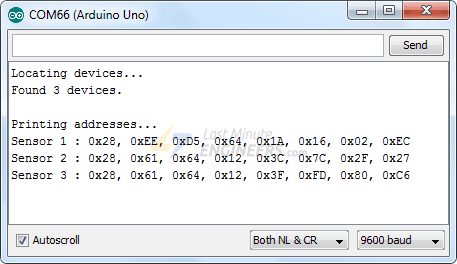
Serial.println("Locating devices...");
Serial.print("Found ");
deviceCount = sensors.getDeviceCount();
Serial.print(deviceCount, DEC);
Serial.println(" devices.");
Serial.println("");
Serial.println("Printing addresses...");
for (int i = 0; i < deviceCount; i++)
{
Serial.print("Sensor ");
Serial.print(i+1);
Serial.print(" : ");
sensors.getAddress(Thermometer, i);
printAddress(Thermometer);
}
}
void loop(void)
{}
void printAddress(DeviceAddress deviceAddress)
{
for (uint8_t i = 0; i < 8; i++)
{
Serial.print("0x");
if (deviceAddress[i] < 0x10) Serial.print("0");
Serial.print(deviceAddress[i], HEX);
if (i < 7) Serial.print(", ");
}
Serial.println("");
}
104
« : 10 Mart 2019, 11:21:52 »
İşlem Basamakları:1. RTC bağlantısı yukarıdaki resimde görüldüğü gibi yapılır. 2. RTC kütüphanesi eklenir. 3. Aşağıdaki kodlamada bulunan 25. satırdaki tarih ve saat bilgisi güncellenerek kodlar yüklenir. // Date and time functions using a DS1307 RTC connected via I2C and Wire lib
#include <Wire.h>
#include "RTClib.h"
RTC_DS1307 rtc;
void setup () {
Serial.begin(9600);
#ifdef AVR
Wire.begin();
#else
Wire1.begin(); // Shield I2C pins connect to alt I2C bus on Arduino Due
#endif
rtc.begin();
// if (! rtc.isrunning()) {
Serial.println("RTC is NOT running!");
Serial.println((__DATE__, __TIME__));
// following line sets the RTC to the date & time this sketch was compiled
// rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
rtc.adjust(DateTime(__DATE__, __TIME__)); //yes - I want it to adjust to compile time
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
rtc.adjust(DateTime(2019, 3, 10, 9, 54, 0));
// }
}
void loop () {
DateTime now = rtc.now();
Serial.print(now.year(), DEC);
Serial.print('/');
Serial.print(now.month(), DEC);
Serial.print('/');
Serial.print(now.day(), DEC);
Serial.print(' ');
Serial.print(now.hour(), DEC);
Serial.print(':');
Serial.print(now.minute(), DEC);
Serial.print(':');
Serial.print(now.second(), DEC);
Serial.println();
Serial.print(" since midnight 1/1/1970 = ");
Serial.print(now.unixtime());
Serial.print("s = ");
Serial.print(now.unixtime() / 86400L);
Serial.println("d");
// calculate a date which is 7 days and 30 seconds into the future
DateTime future (now.unixtime() + 7 * 86400L + 30);
Serial.print(" now + 7d + 30s: ");
Serial.print(future.year(), DEC);
Serial.print('/');
Serial.print(future.month(), DEC);
Serial.print('/');
Serial.print(future.day(), DEC);
Serial.print(' ');
Serial.print(future.hour(), DEC);
Serial.print(':');
Serial.print(future.minute(), DEC);
Serial.print(':');
Serial.print(future.second(), DEC);
Serial.println();
Serial.println();
delay(3000);
}
105
« : 22 Şubat 2019, 13:23:14 »
Sayfa: 1 ... 5 6 [7] 8 9 ... 45
|